1) Principe de déplacement du robot aspirateur
Afin de répondre à la fonction de service « se déplacer en tenant compte des obstacles » du robot, un système de deux roues motorisées par des moteurs à courant continu, indépendantes, et d’une roue folle a été retenu.
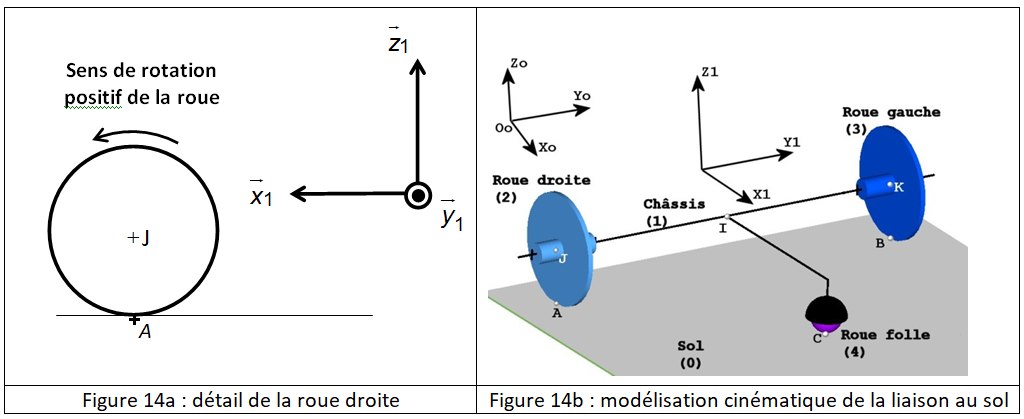
La figure 14b présente la modélisation cinématique de la liaison au sol du robot qui comprend : une roue motrice droite (détaillée figure14a), une roue motrice gauche, et, à l’avant, une roue dite « folle » (non motorisée) servant uniquement de point d’appui.
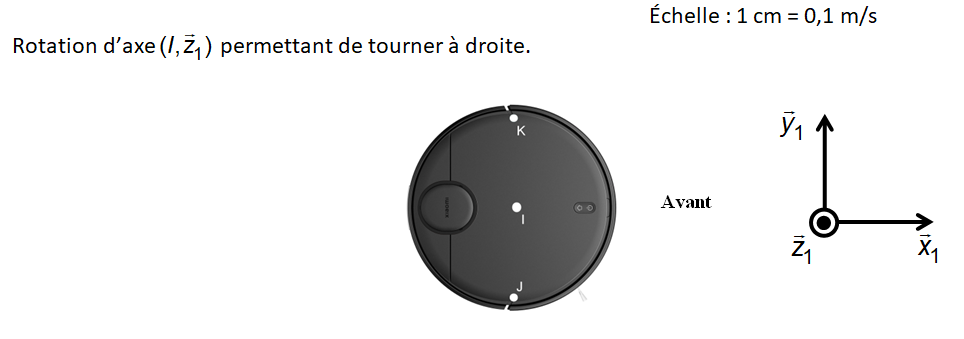
Le document ci-après représente le robot en vue de dessus avec le repérage des points :
· J (centre de la roue (2) droite) ;
· K (centre de la roue (3) gauche) ;
· I (point milieu de l’essieu).
Q1/ TRACER, pour les trois cas de figure :
(en vert) les trajectoires TK (1/0) et TJ (1/0) des points K et J du robot par rapport au sol,
(en rouge) les vecteurs vitesses V K (1/0) et V J (1/0) avec V K (1/0) = V J (1/0) = 0,3 m/s.
Q2/ COMPLETER le sens de rotation (positif ou négatif selon y1) des deux roues motrices pour chaque cas.