2) Comment définir une nouvelle stratégie afin d'optimiser le déplacement ?
Le principe utilisé ici, est de supprimer les déplacements inutiles en anticipant les obstacles, ce qui implique de les détecter plus tôt, et ce qui a pour conséquence d’adopter une trajectoire courbe.
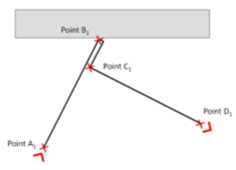
Stratégie n°1 : stratégie actuelle
L’obstacle est détecté au point B.
Les points B et C marquent des variations de vitesses (accélérations ou décélérations).
Au point C, un changement de direction s’effectue par rotation sur place.
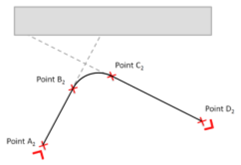
Stratégie n°2 : stratégie de détection préventive
L’obstacle est détecté au point B.
Les points B et C marquent des changements de trajectoire.
Le changement de direction s’effectue de façon progressive entre les points B et C.
Q3/ Que peut-on dire de la distance totale parcourue entre les points A et D, pour chaque solution ? Quelle est la solution la plus économique de ce point de vue ?
Q4/ COMPLÉTER le graphe de V2 pour la stratégie N°2.
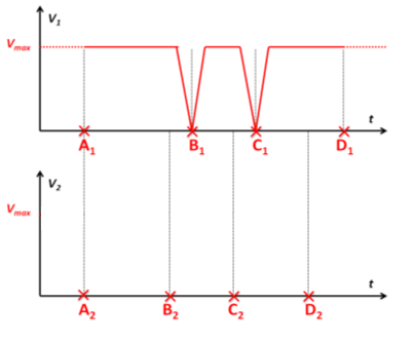
V (m/s) en valeur absolue en fonction du temps (s).
Dans les deux cas, la vitesse maximale de déplacement est la même.
Q5/ D’après le graphe précédent, quelle solution semble être la plus rapide, pour des points de départ et d’arrivée identiques. EXPLIQUER.
Q6/ À chaque variation de vitesse (lors d’une accélération ou d’une décélération [freinage]), la motorisation doit dépenser une énergie plus grande que pour effectuer le même mouvement à vitesse constante. Que pouvez-vous dire des deux stratégies étudiées, de ce point de vue ?
Q7/ En conclusion de cette partie, quelle semble être la stratégie de déplacement la plus économique selon vous ? JUSTIFIER votre réponse.