Exercice : 1) Comment le robot gère-t-il les obstacles ?
L’aspirateur autonome réagit d’une façon prédéfinie aux obstacles qu’il rencontre. Ce comportement est le résultat d’une interaction entre sa partie opérative (celle qui effectue les actions) et sa partie commande (celle qui choisit les actions à effectuer, en fonction des informations qu’elle récupère). En résumé, cet aspirateur a été programmé pour réagir de façon précise à des situations précises.
Nous allons ici nous intéresser à la stratégie que les concepteurs ont choisie pour éviter les obstacles.
Lors d'une détection d'obstacle, le robot recule de quelques centimètres parallèlement à sa direction d’approche, effectue une rotation à droite ou à gauche de 90°, puis poursuit son cycle de nettoyage.
Question
Q1/ REPRESENTER sur le dessin ci-dessous la trajectoire du robot en utilisant des flèches pour indiquer le sens de déplacement pour chacun des 3 cas d'approche :
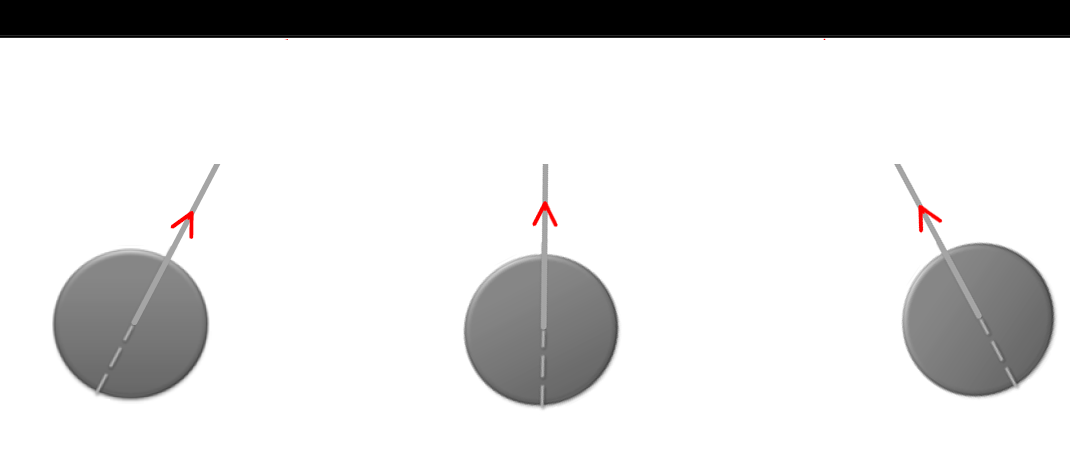
Remarque : Pour simplifier l’étude, on supposera ici que l’aspirateur arrive face à un obstacle en ligne droite.
Question
Q2/ Quels sont les inconvénients d'une telle stratégie en terme de consommation d'énergie et de consommation de temps ?
seules les branches d’arrivée et de départ (flèches rouges) sont …………….. pour l’utilisateur ;
les phases de ………………………………………….... consomment de l’énergie ;
les phases de ……………………………………………. consomment également du temps.
Indice
Choix possibles : Neutre, Changement d'orientation, Perpendiculaire, Utile, Changement de direction.