3) Pourquoi optimiser la navigation ?
L'efficacité d'un robot aspirateur est en grande partie due à la façon dont il va se déplacer dans les zones à aspirer. L'objectif est de calculer une trajectoire optimale de façon à nettoyer un maximum de surface en un minimum de déplacement.
L'efficacité de l'algorithme de déplacement est très variable selon les modèles. Les robots les plus basiques se déplacent aléatoirement tandis que les plus perfectionnés cartographient leur environnement pour une navigation optimale.
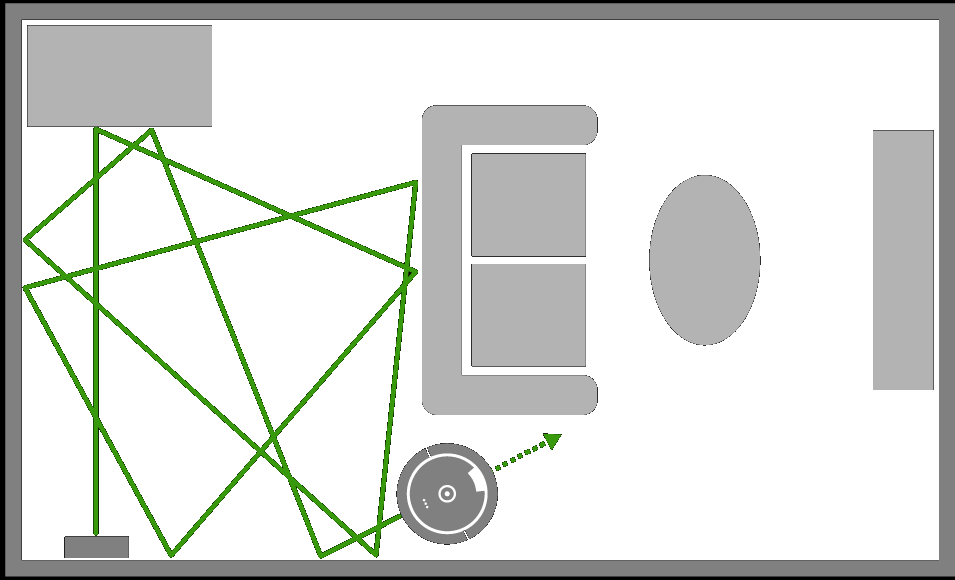
Déplacement aléatoire : C'est un mode de navigation que l'on retrouve généralement sur des modèles entrée de gamme. Le robot change simplement de direction à chaque fois qu'il rencontre un obstacle (mur, meuble, escalier, etc.).
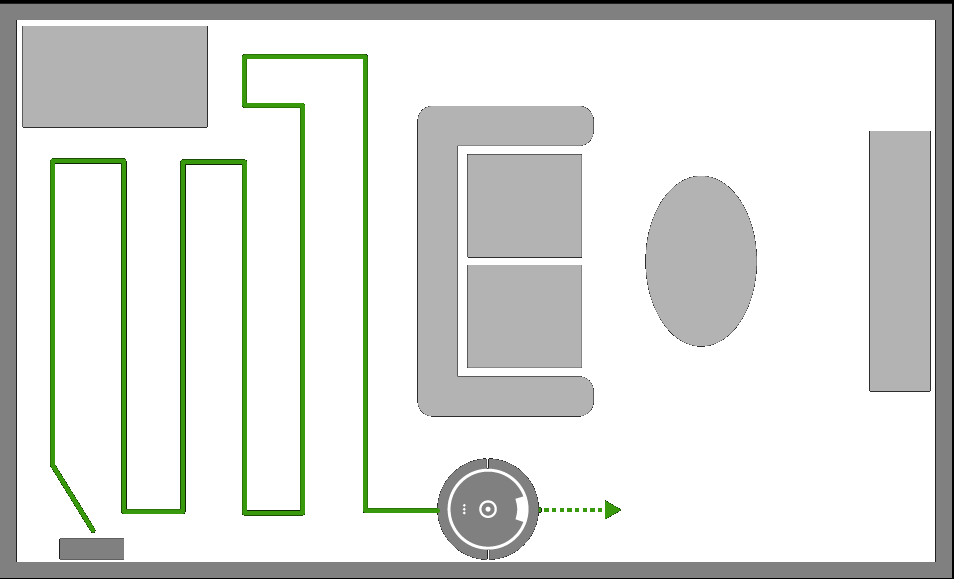
Déplacement intelligent : La majorité des robots (milieu et haut de gamme tout du moins) sont aujourd'hui capables d'optimiser leur trajet, en évitant notamment de passer plusieurs fois au même endroit. Si disponible, la cartographie est un atout majeur pour une navigation optimisée.
Dans notre cas, le robot aspirateur Xiaomi Vacuum S12 possède des capteurs laser cartographiques de type LIDAR (LIght Detection And Ranging) / LDS (Laser Distance Sensor). Ces capteurs permettent, grâce à un balayage à 360°, de percevoir précisément l'environnement et de réaliser une cartographie du logement.

Q8/ CALCULER la distance parcourue par le robot (en m) dans la pièce représentée ci-après (3,4 m x 3,1 m). La cartographie ainsi optimisée de sa trajectoire prend en compte la stratégie de détection préventive d'obstacle (murs).
Ne pas tenir compte de la distance retour (en pointillés) à la base de chargement.
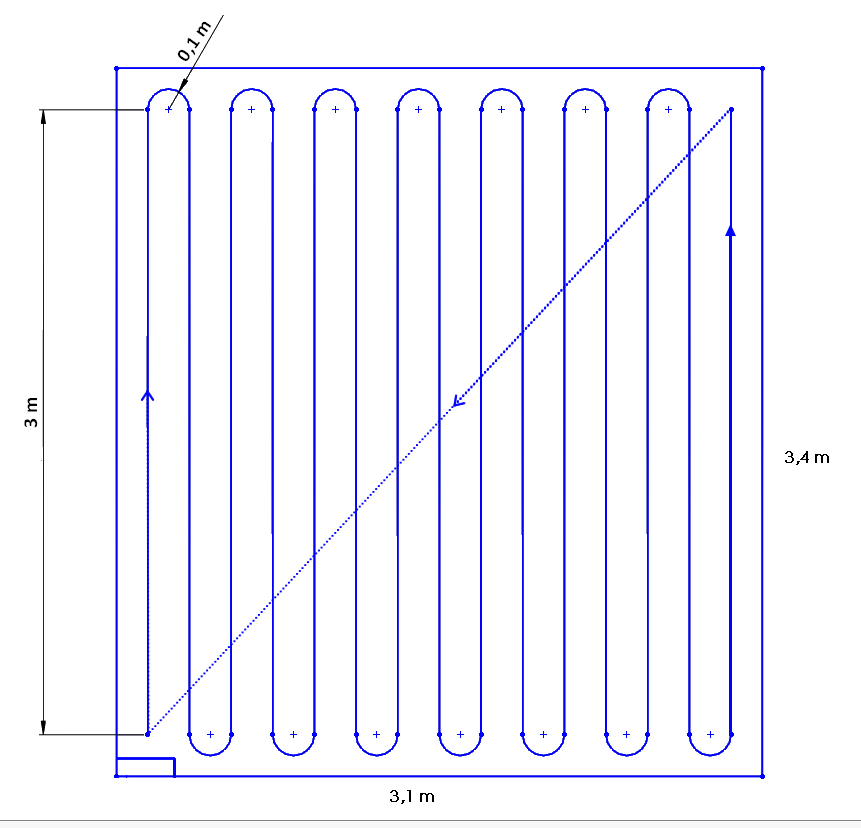
Q9/ CALCULER le temps nécessaire (en minutes) pour aspirer cette pièce sachant que le robot se déplace à une vitesse moyenne de 600 m/h.