Présentation du système
Présentation
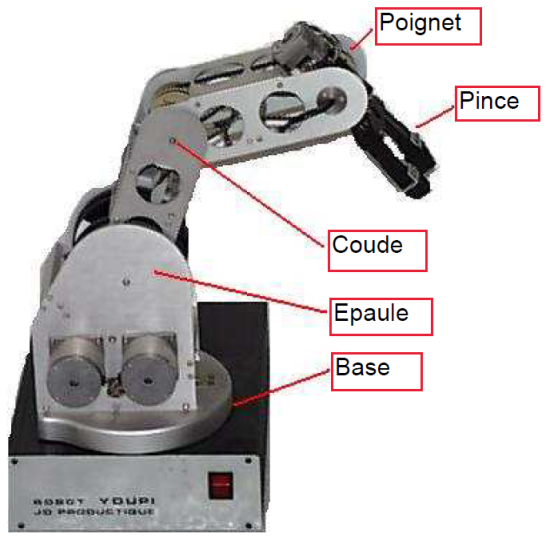
Le bras motorisé est constitué de 5 grandes parties :
Une base (fixe) ;
Une épaule ;
Un coude ;
Un poignet ;
Une pince.
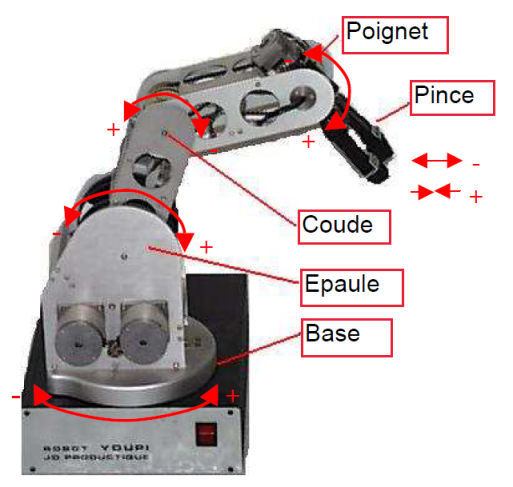
Mouvements
Le bras motorisé permet de saisir un objet de taille réduite et de le déplacer suivants plusieurs directions.
Les mouvements possibles sont les suivants :
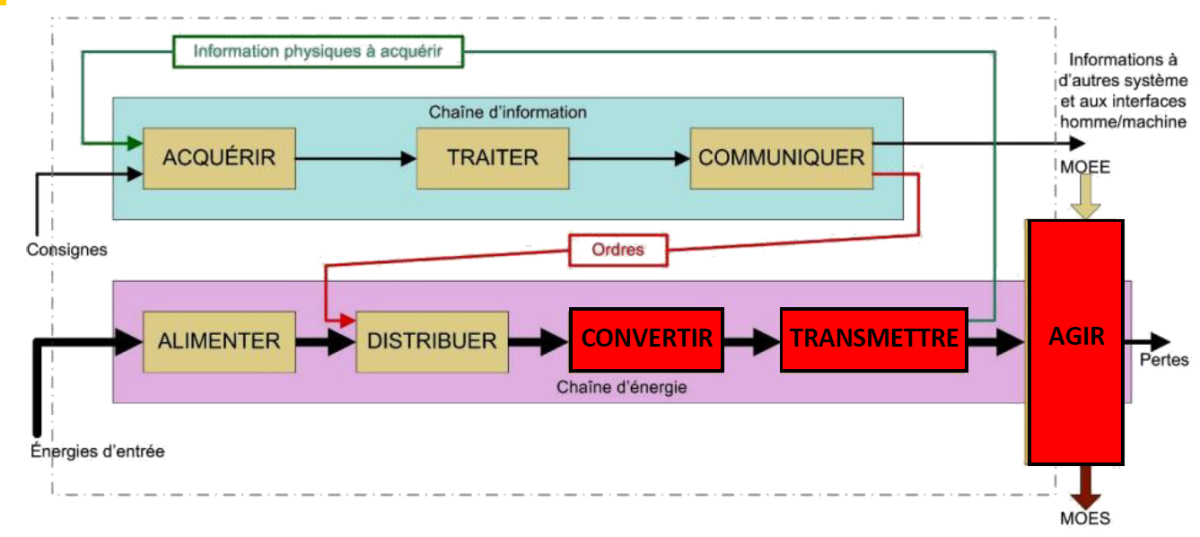
Chaîne fonctionnelle – Fonction étudiée : TRANSMETTRE
Pince
L'étude portera sur la pince ont on donne la maquette numérique et deux représentations (isométrique et vue de face) ci-dessous.
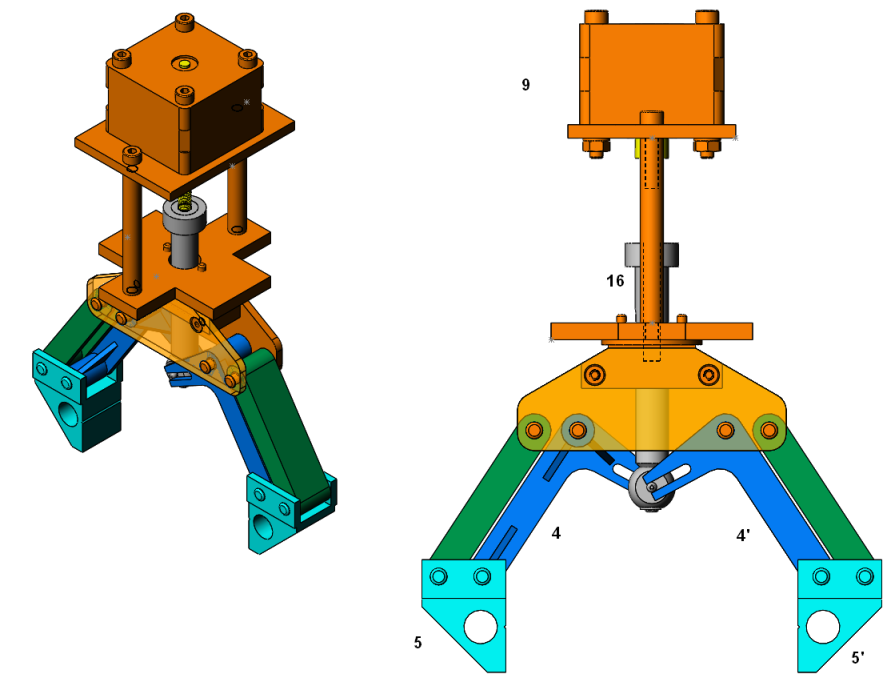
La pince de robot est à commande électrique. Elle permet de manipuler aussi bien des pièces cylindriques que prismatiques grâce à ses 2 doigts 5 et 5'.
Le moteur pas à pas 9 engendre la translation de l'axe de poussée 16 par l'intermédiaire d'un système vis-écrou (translation vers le haut en phase de fermeture et translation vers le bas en phase d'ouverture).
L'axe de poussée provoque la rotation des leviers 4 ce qui provoquera le mouvement de translation circulaire des doigts 5 et 5' grâce aux parallélogrammes déformables.