Détermination de la vitesse du point E
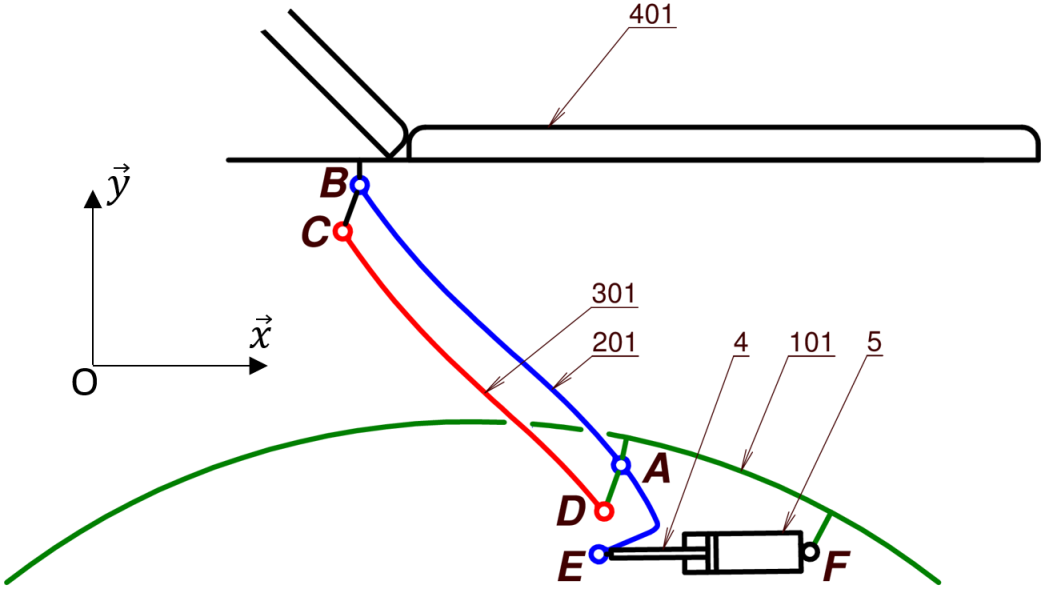
Schéma cinématique
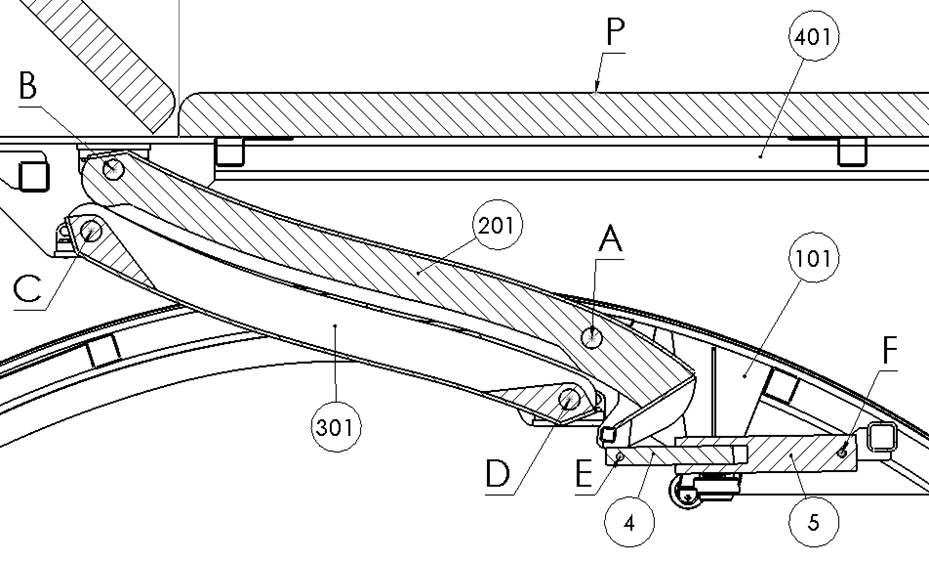
Les liaisons entre chaque sous-ensemble sont des liaisons pivots sauf pour la liaison entre la tige de vérin et le corps de vérin qui sera considérée comme une liaison glissière.
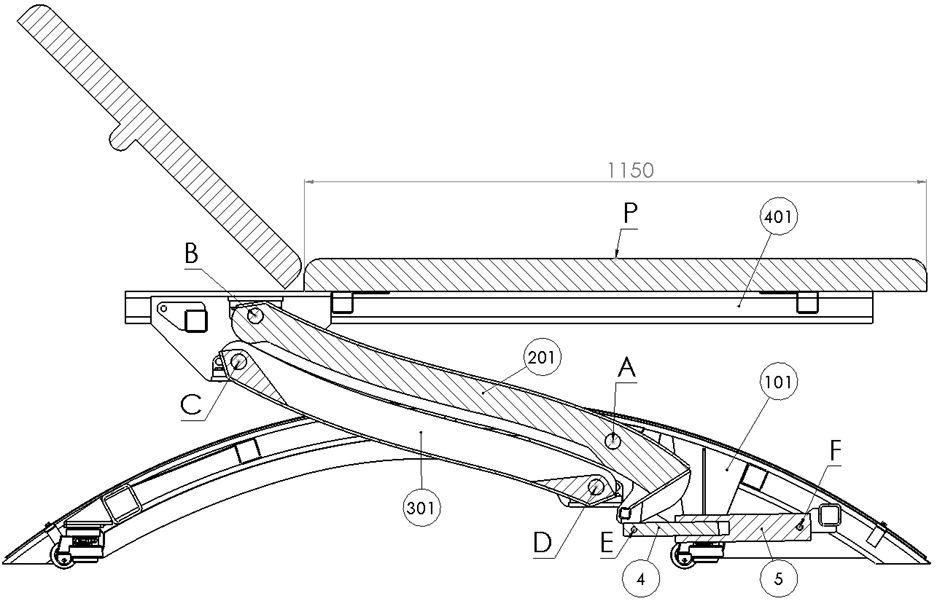
L'étude sera menée dans un premier temps pour la position du mécanisme définie sur le document DR1. On précise que le mécanisme est en phase de montée.
AE = 168 mm et AB = 700 mm.
Le cahier des charges nous imposant une vitesse maximale de 150 mm/s en périphérie du plateau \(\left \|\overrightarrow{V_{P\in401/101}} \right \|= 150 mm.s^{–1}\), nous allons déterminer la vitesse maximale de la tige de vérin.
Q1. Donner la nature du mouvement de 401/101 : Mvt 401/101. En déduire que \(\overrightarrow{V_{P\in401/101}}=\overrightarrow{V_{B\in401/101}}=\overrightarrow{V_{C\in401/101}}\).
Q2. Déterminer la relation de composition de vitesses qui lie \(\overrightarrow{V_{B\in401/101}}\) avec \(\overrightarrow{V_{B\in201/101}}\) et \(\overrightarrow{V_{B\in401/201}}\). Justifier que \(\overrightarrow{V_{B\in401/101}}=\overrightarrow{V_{B\in201/101}}\).
Q3. Définir le mouvement de 201/101 : Mvt 201/101.
Q4. Mettre en place la vitesse \(\left \|\overrightarrow{V_{B\in201/101}} \right \|=150 mm.s^{-1}\) à l'échelle demandée sur DR1. Justifier votre tracé sur feuille de copie.
Q5. Calculer la vitesse angulaire \(\omega_{201/101}\) du bras repéré (201) sachant que la vitesse linéaire \(\left \|\overrightarrow{V_{B\in201/101}} \right \|=150 mm.s^{-1}\).
Q6. Tracer le support de \(\overrightarrow{V_{E\in201/101}}\). Justifier votre tracé sur feuille de copie.
Q7. Connaissant \(\overrightarrow{V_{B\in201/101}}\), déterminer et tracer \(\overrightarrow{V_{E\in201/101}}\) sur DR1 par la méthode de votre choix. Énoncer sur feuille de copie la propriété utilisée.