Exploitation de la simulation et des résultats
Simulation et résultats du montage 1 sans la pesanteur
A partir du modèle MATLAB, relever la masse du parallélépipède.
Réaliser une simulation pendant 3 secondes → Vérifier le temps de simulation choisi  .
.
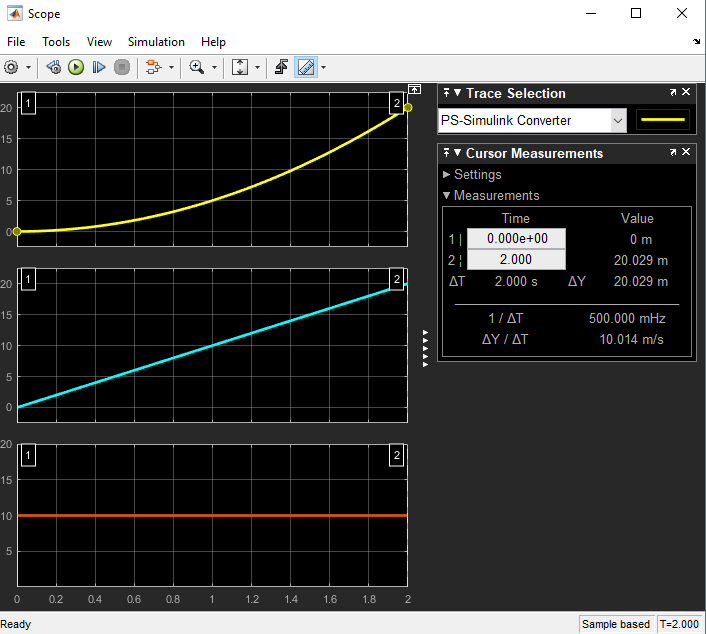
Visualiser les graphes de la vitesse, de l'accélération et de la position, à l'aide du scope.
En déduire :
L'accélération en mm.s–2 subit par le parallélépipède.
Le graphe de la vitesse de translation en mm.s–1.
La position (Déplacement en translation) en mm à l'issue de la simulation (à la fin des 3 secondes).
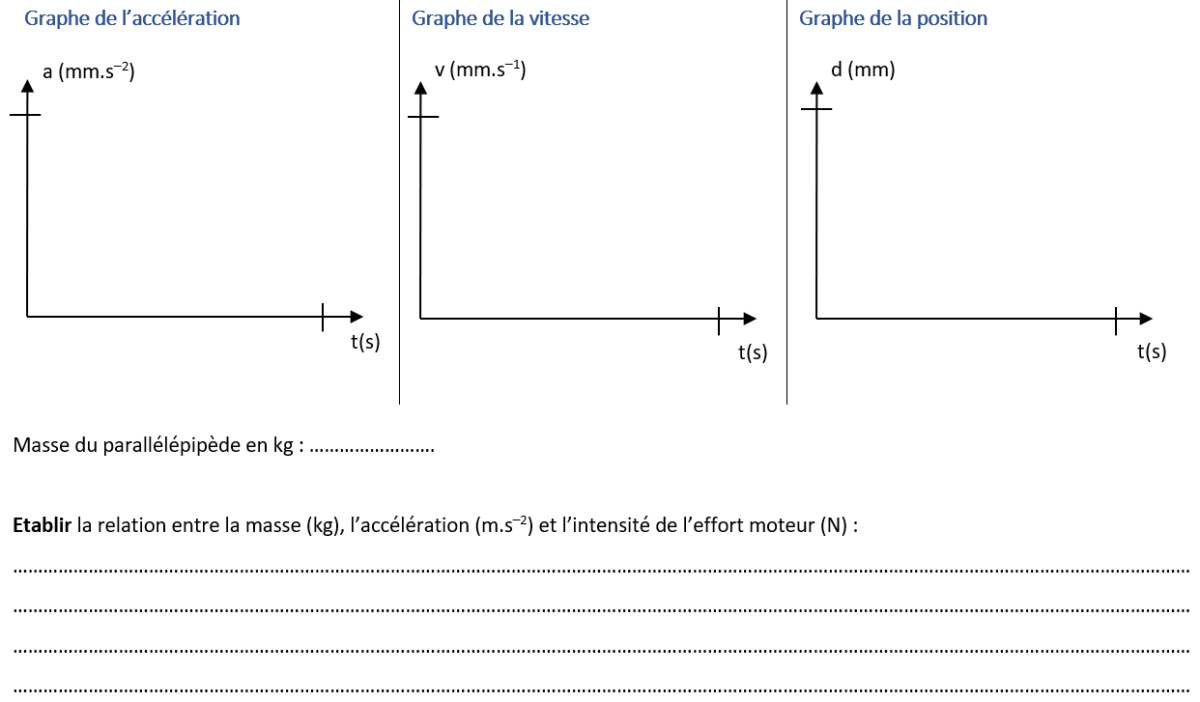
Compléter le document réponse.
Établir une relation entre la masse (kg), l'accélération (m.s–2) et l'intensité de l'effort moteur (N).
Justifier le résultat trouvé.
Simulation et résultats du montage 2 sans la pesanteur
Effectuer les mêmes simulations et relevés de résultats sur le fichier "Montage2_trans" qui se présente avec un parallélépipède de (100mm x 100mm x 500mm).
Pour cela, avec le logiciel Matlab, Ouvrir le modèle "Montage2_trans".
En l'état, l'étude n'est pas possible car la liaison glissière ("Prismatic") n'est pas pilotée (contrairement au montage 1).

Il faut donc utiliser le gestionnaire de bibliothèque ![]() pour "récupérer" les éléments ci-dessous à insérer dans le modèle comme ci-contre.
pour "récupérer" les éléments ci-dessous à insérer dans le modèle comme ci-contre.
Ajouter les éléments ci-dessous dans le modèle comme ci-contre.
Fonction du composant | Représentation | Bibliothèque |
|---|---|---|
Conversion d'un signal Simulink en signal Physique |
| Simscape / Utilities |
Conversion d'un signal Physique en signal Simulink |
| Simscape / Utilities |
Constante |
| Simulink / Sources |
Moniteur |
| Simulink / Sinks |





Pour l'instant les composants ne peuvent pas être relié à la liaison glissière.
pour cela, il faut préciser que l'on souhaite commandé la liaison (en précisant comment : "Force" ou "Vitesse" - Effort ou flux).
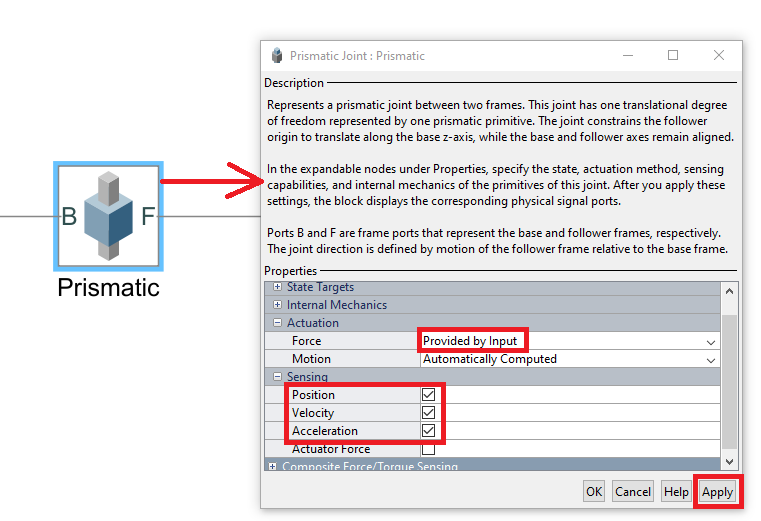
Double-cliquer sur la liaison "Prismatic".
Développer la ligne "Actuation" (en cliquant sur le "+").
Sélectionner "Provided by Input" pour la "Force".
Développer la ligne "Sensing" (en cliquant sur le "+").
Cocher les paramètres à visualiser : "Position", "Velocity" et "Accélération".
Cliquer sur "Apply" puis sur "OK".

Ouvrir le Scope , sélectionner "File" → "Number of Inputs Ports" et en prendre 3.
Relier les différents composants comme sur le modèle ci-contre.
Le modèle est maintenant prêt pour l'exploitation.
Faire valider par le professeur la finalisation de la simulation multiphysique.
Effectuer les mêmes simulations et relevés de résultats sur le fichier montage2 qui se présente avec un parallélépipède de (100mm x 100mm x 500mm).
Compléter le document réponse.