Validation de la course par simulation
On se propose de vérifier que le vérin choisi par le constructeur permet bien :
d'atteindre l'élévation verticale annoncée dans le CdCF.
On donne le schéma cinématique du système à parallélogramme en position basse :
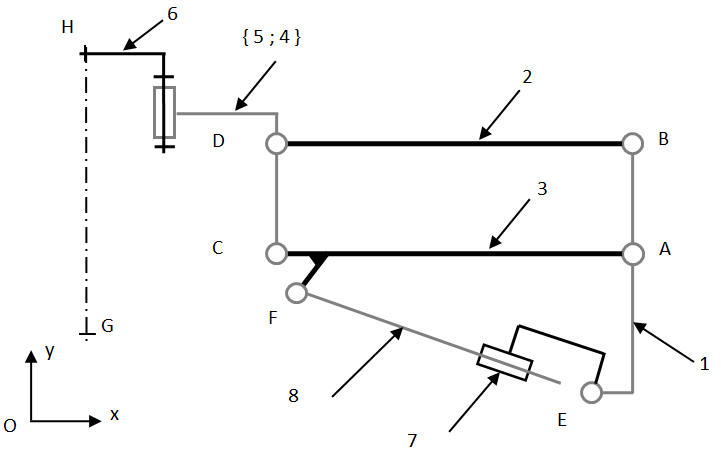
Dans ce schéma, le vérin électrique est modélisé par une liaison pivot glissant.
La tige du vérin (8) est complètement rentrée et les bras (2) et (3) sont horizontaux.
Le point F représente le centre de l'articulation entre la tige du vérin (8) et le bras inférieur (3).
La position de la personne est modélisée par le point G qui représente le centre de gravité de la personne à soulever. Ce point est situé sensiblement au niveau des hanches.
La personne est suspendue par un harnais accroché en H et le segment [HG] sera considéré vertical durant tout le mouvement.
Afin de vérifier la validité de l'exigence du déplacement vertical, on se propose de représenter le mécanisme en position haute et de déterminer la valeur de l'élévation verticale du point G dans cette position. Cette étude se fera graphiquement sur le document DR1.
Analyse de la position basse
Q9. Pour le mécanisme en position basse, coter sur DR2 la position de la personne par rapport au sol.
Donner cette valeur à l'échelle 1:1 sur le document DR2.
La valeur trouvée est-elle en conformité avec le CDCF ? (Justifier)
Détermination de l'élévation maximale de la personne soulevée
Q10. A l'aide de la simulation, déterminer l'élévation verticale du point G entre les positions basse et haute pour la course totale du vérin. Coter sur DR2 l'élévation verticale du point G entre les positions basse et haute. Donner sa valeur à l'échelle 1:1 sur DR2.
Q11. En remarquant que les distances CG et DG sont invariantes, tracer la position finale du point G. Coter sur DR2 la position finale de la personne par rapport au sol. Donner cette valeur à l'échelle 1:1 sur le document DR2. La valeur trouvée est-elle en conformité avec le CDCF ? (Justifier)