Annexe 1 : Commande d'axe avec moteur à courant continu et Commande d'axe avec moteur à courant pas-à-pas
Commande d'axe avec moteur à courant continu
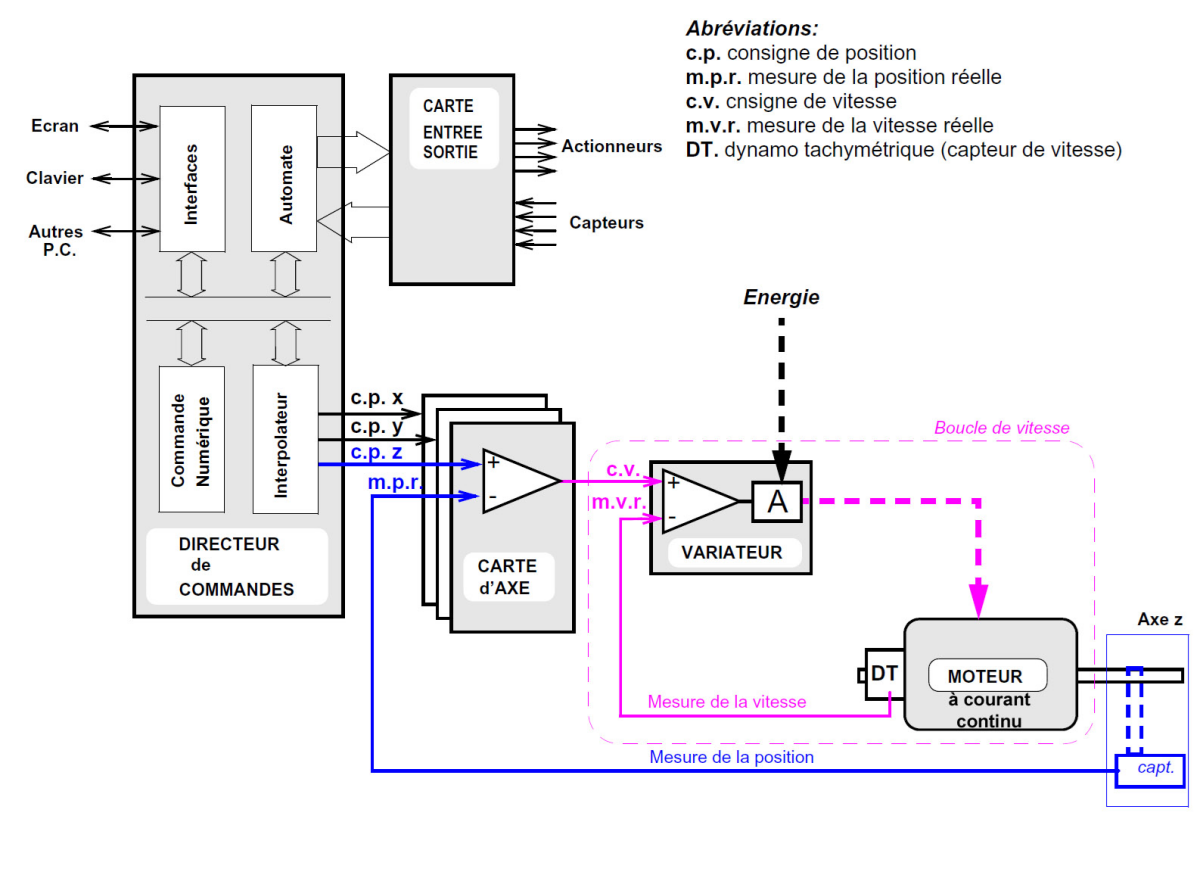
Commande d'axe avec moteur à courant continu
Commande d'axe avec moteur à courant pas-à-pas
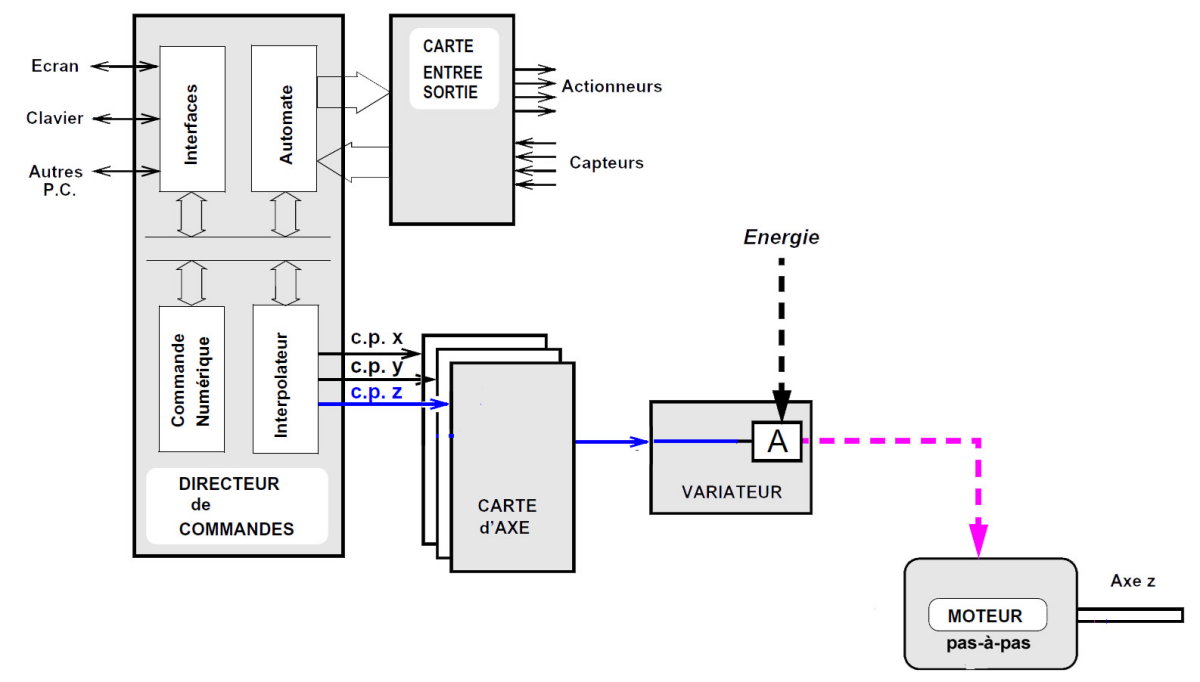
Commande d'axe avec moteur à courant pas-à-pas