Prise en main, mise en œuvre et intérêt d’un système asservi
Cette première partie nécessite la lecture préalable des fiches : « Utilisation Logiciel ».
Mesurer les performances d’un système asservi
Q1. Piloter la trieuse à 300°/s =31.4 tour/min afin d’effectuer un tri. Pour cela il faudra effectuer un essai BF gabarit avec une consigne de 300°/s. Afficher la courbe de vitesse de rotation.
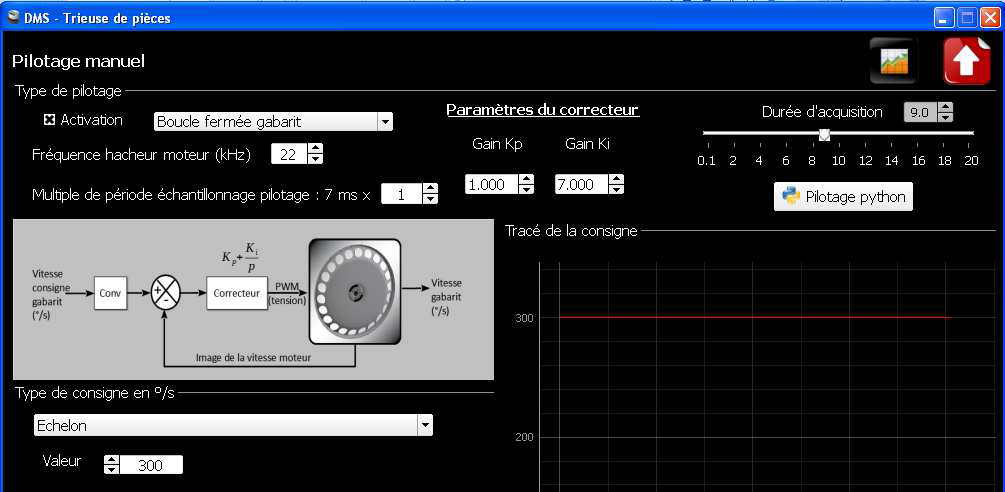
Identifier le capteur qui détecte le passage de pièce sur la machine.
Mesurer la rapidité, précision, amortissement stabilité du système.
Intérêt d’un système asservi
Q2. Effectuer un essai en Boucle ouverte pour une consigne de 400 inc et une durée de 6s. Poser par intermittence le doigt sur le plateau et observer si le système réagit à votre perturbation.
Effectuer un essai en Boucle Fermée pour une consigne de 300 °/s et une durée de 6s. Poser par intermittence le doigt sur le plateau et observer si le système régit à votre perturbation. Comparer la réaction par rapport à la boucle ouverte.
Conclure sur l’intérêt d’asservir.
Identifier un modèle d’ordre 1
Q3. Effectuer un essai en Boucle ouverte pour une consigne de 500 inc (9V) et une durée de 1s et tracer la courbe de vitesse. Mesurer la valeur finale et le temps pour atteindre 63% de cette valeur.
Identifier les paramètres K (en (°/s)/inc) et \(\tau\) du modèle d’ordre 1.
Implémentation et utilisation d’un modèle
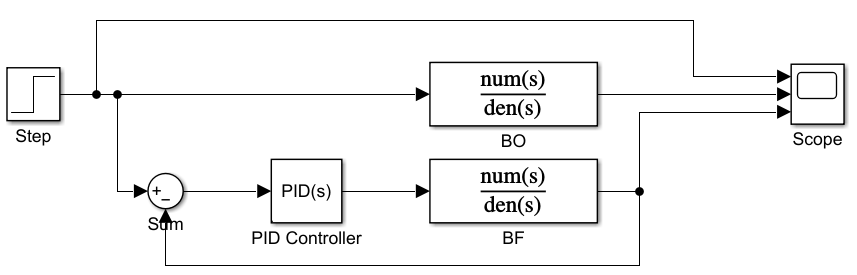
Q4. Réaliser un modèle numérique pour comparer une boucle ouverte et une boucle fermée en utilisant une fonction de transfert correspondante à votre identification. Ajouter un correcteur PI. Simuler le fonctionnement puis mesurer les critères du cahier des charges sur la courbe du modèle en boucle fermée.
Synthèse
Q5. Conclure sur la modélisation de la boucle fermée en vitesse.