Modélisation de la boucle ouverte
Afin de réaliser une modélisation complète de l’asservissement, il faut s’assurer du modèle en boucle ouverte. En effet la boucle ouverte modélise la chaine d’action et donc tous les paramètres mécaniques
Visualiser l’effet du gabarit sur le temps de réponse et la vitesse finale
Le TP propose de traiter uniquement la problématique liée au tri. Lorsque la pièce tombe sur le plateau, il faut que celui-ci tourne à vitesse constante quelque soir le nombre de pièce ou le frottement. Il faut donc réaliser un asservissement en vitesse.
Q6. En vous aidant de la fiche utilisation logiciel, Effectuer un essai en BO pour une consigne de 800 inc pendant 2s. Observer la valeur finale.
Modéliser l’inertie
L’inertie est le paramètre \(J_{eq}\) qui va traduire la répartition des masses autour de l’axe de rotation.
Les équations de comportement du moteur sont :
\(c_m(t)=K\,.\, i(t)\)
\(E(t)=K\,.\, \omega(t)\)
\(c_m(t)-c_r(t)=J_{eq}\,.\, \dfrac{d \omega(t)}{dt}\)
\(u(t)=E(t) + R \,.\, i(t)\)
Les caractéristiques du moteur sont \(K=0.044 \, \text{V/(rad/s)}\)V/(rad/s); \(R=8.9 \, \Omega\).
Q7. Ecrire les équations précédentes dans le domaine de Laplace, tracer le schéma bloc correspondant avec \(\Omega(p)=H_1(p) \, U(p) - H_2(p) \, C_r(p)\) et exprimer \(H_1(p)\) et \(H_2(p)\) en fonction de \(R\), \(J\) et \(K\) .
Montrer qu'il s'agit de fonctions de transfert du 1er ordre et identifier la constante de temps du système.
Q8. Effectuer un essai en boucle ouverte pour une consigne de 800 inc et mesurer le temps de réponse à 5%.
Q9. Calculer à partir de la mesure de la constante de temps précédente l’inertie équivalente \(J_{eq}\).
Réaliser les essais en BO nécessaires à la modélisation
Q10. Effectuer des essais en BO pour des consignes de 100, 550, 600, 700, 800, 900,1000. Compléter les cases jaunes du fichier « identification_gabarit_eleve.xls » en pièce jointe ci-dessous.
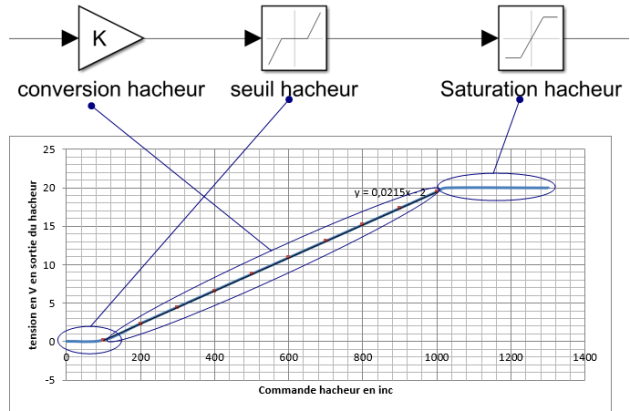
Modéliser le comportement du hacheur
La caractéristique du hacheur est donnée. Il est alimenté sous 24V. Il y a donc une bande morte et une saturation.
Q11. Compléter les blocs du schéma bloc qui modélise ce composant.
Modéliser le comportement lié au frottement sec
Q12. Ecrire les équations du moteur en régime permanent et donner la relation entre la vitesse en régime permanent, la tension d’alimentation et le couple résistant.
Il faut maintenant identifier le modèle de comportement de ce couple résistant.
Q13. En complétant les cases jaunes du fichier « identification_gabarit.xls », la courbe de la vitesse angulaire en fonction de la tension été tracée (\(\omega = f(U)\)). Relever l’équation.
Q14. A partir des relations en régime permanent et des essais en BO en déduire la valeur de Cr. Compléter la case verte avec le résultat en N.m.
Q15. Affiner le résultat en utilisant l’outil recherche de valeur cible.
Q16. Compléter les valeurs numériques du schéma BO « modelisation_moteur_plateau_BO_eleve.zcos ». Faire une étude paramétrique en simulation et comparer modèle et réel. Que constatez-vous avec une consigne de 100 ?
Pour une consigne de 100, la consigne est plus faible que le couple. Aussi, le couple ne compense pas le couple résistant et le modèle ne tourne pas dans le bon sens. Ceci ne correspond pas à la réalité. En effet, la présence de frottement fait que en dessous d’un certain seuil le système ne bouge pas.
Q17. Remplacer dans le modèle le couple résistant par une bande morte qui permettra de modéliser convenablement l’effet de seuil lié au frottement sec. Effectuer de nouveau la simulation et comparer modèle et mesure.
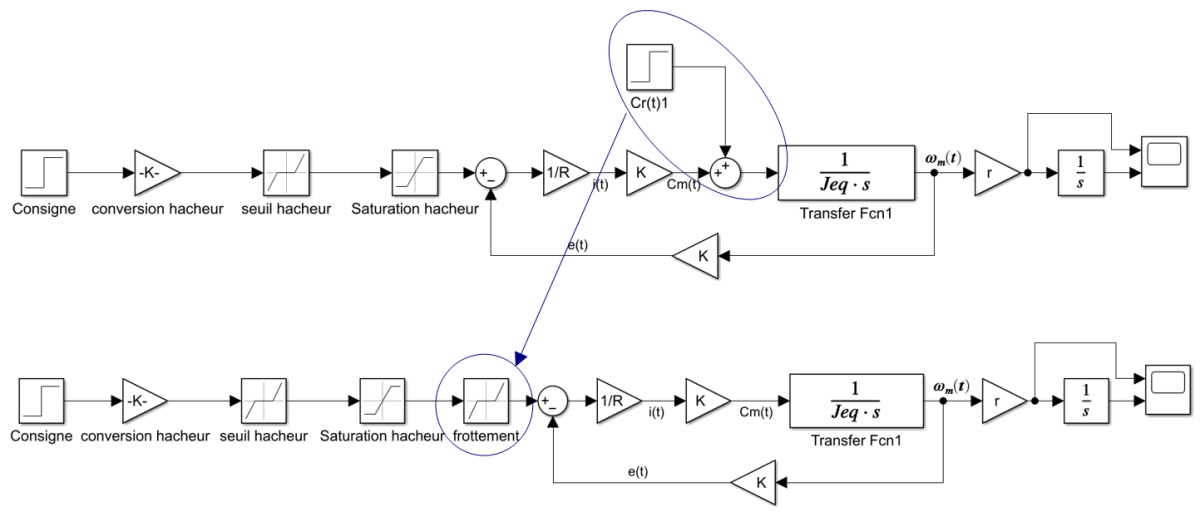
Il faut « faire passer » le couple résistant de l’autre côté du sommateur.