4 / Programmation du bras robotisé
Étape 1 - Programmation sans boucle
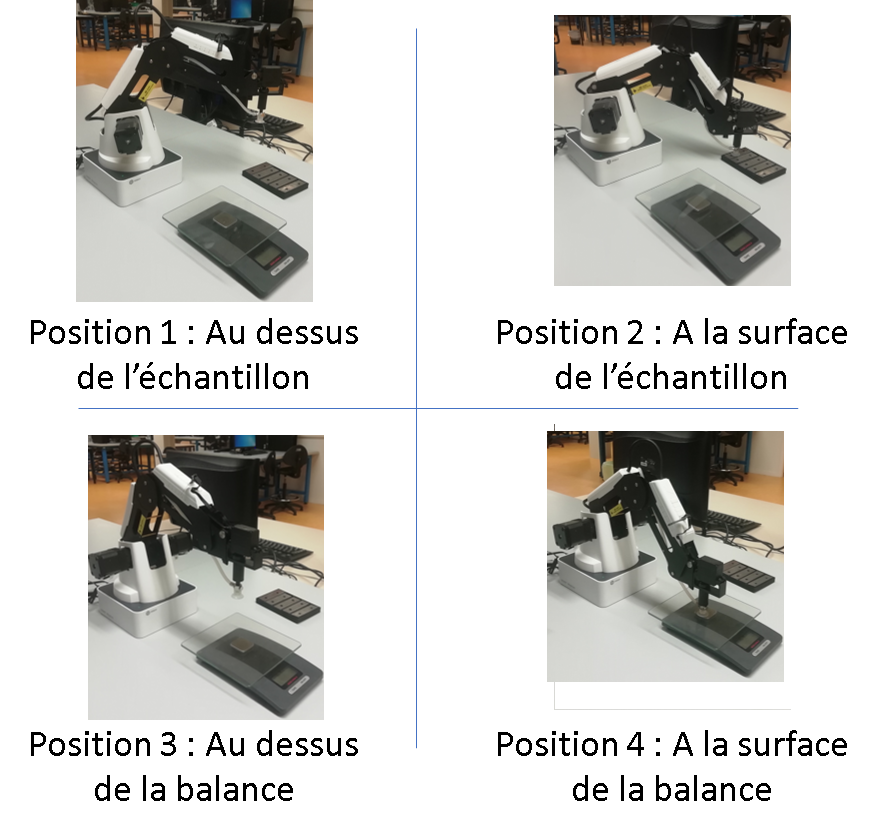
Q10) A partir de la fenêtre Teaching & PLayback récupérer les différentes coordonnées cartésiennes des positions 1 à 4 et compléter le tableau[1]:

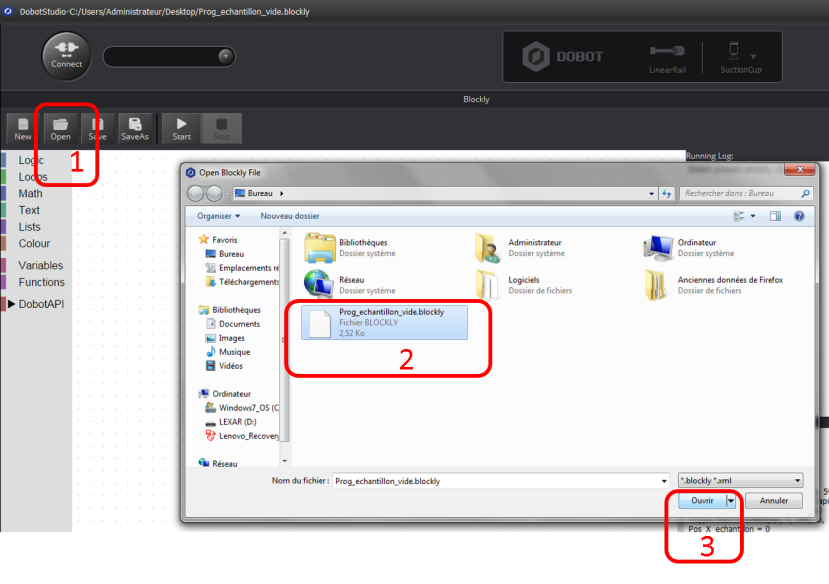
Depuis la fenêtre principale du logiciel Dobot Studio cliquer sur l'application Blocky 
Téléverser le fichier Programme blocky [zip] puis dézipper le dossier sur votre bureau.
Enfin sur la fenêtre de l'application Blocky ouvrir le fichier Prog_echantillon_vide.
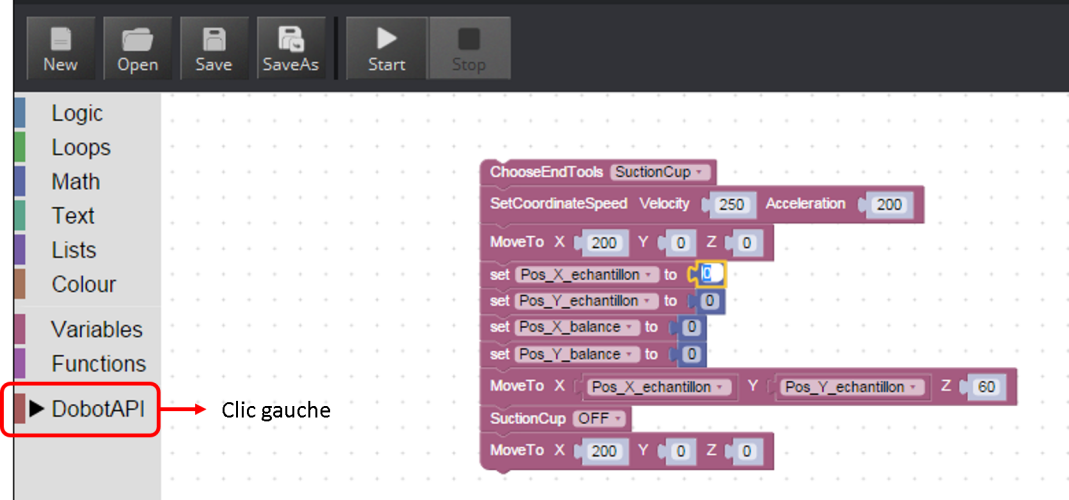
Complément : Utilisation de l'application Blocky - étape 1
Voici une description succincte du programme :
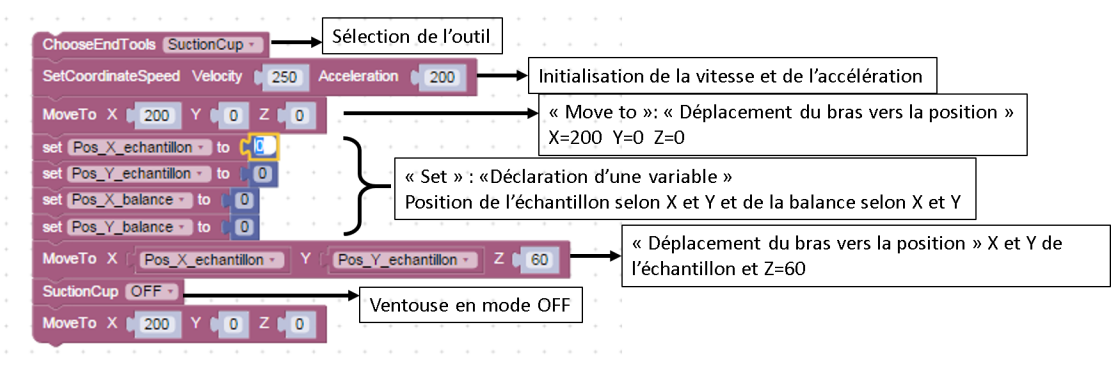
L’objectif est de positionner le bras du robot au-dessus de la position du premier échantillon, soit la position 1.
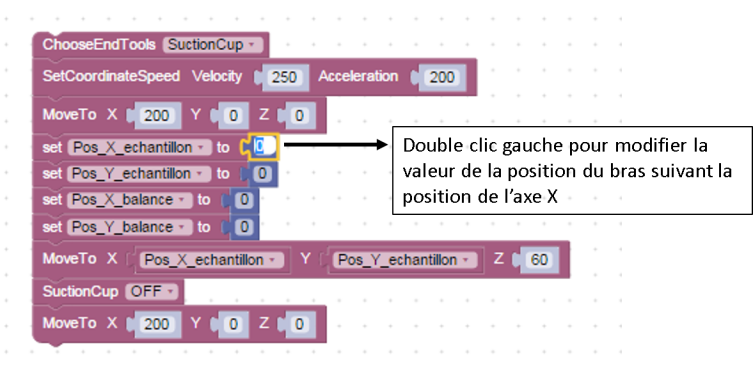
Pour indiquer la position du premier échantillon vous devez modifier les deux variables "Pos_X_echantillon" et "Pos_Y_echantillon".
 ATTENTION : Si vous dépassez la butée un message d'erreur va apparaître en vous bloquant les mouvements
ATTENTION : Si vous dépassez la butée un message d'erreur va apparaître en vous bloquant les mouvements
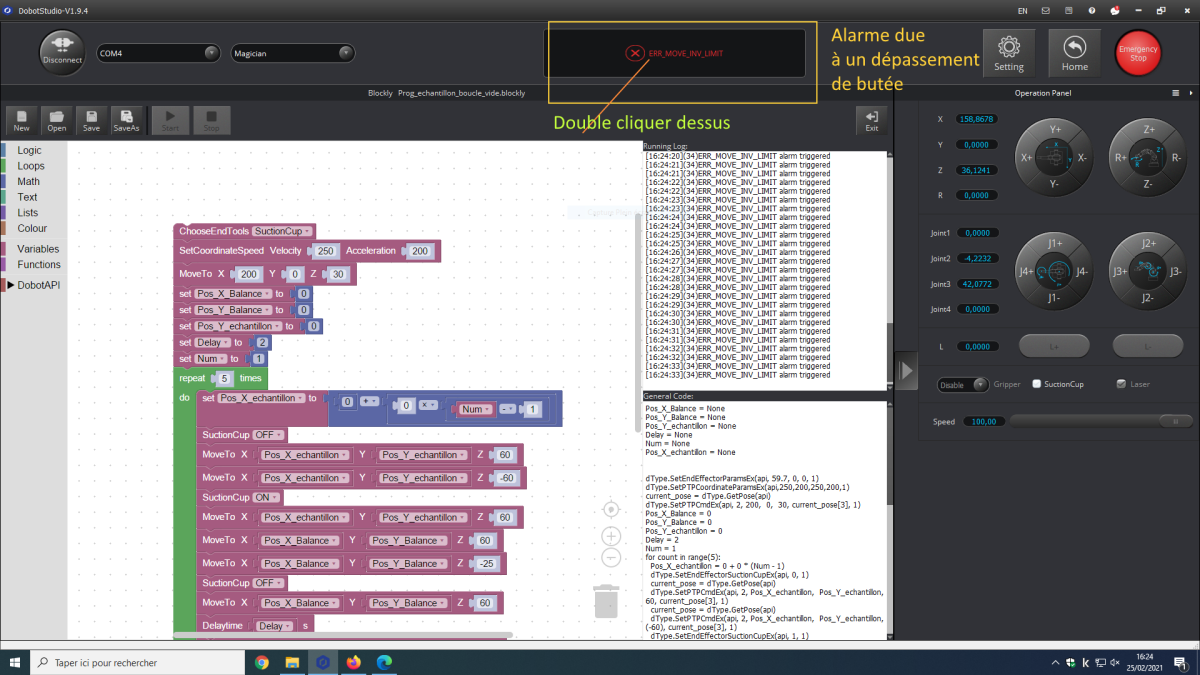
1- Double cliquer sur le message d'erreur comme indiqué sur la copie d'écran ci-dessus
2- Une fenêtre "alarm and log" va s'ouvrir.
3- Cliquer sur le bouton "clear alarm"
4- Attendre quelques instants
5- Faire exit sur la page
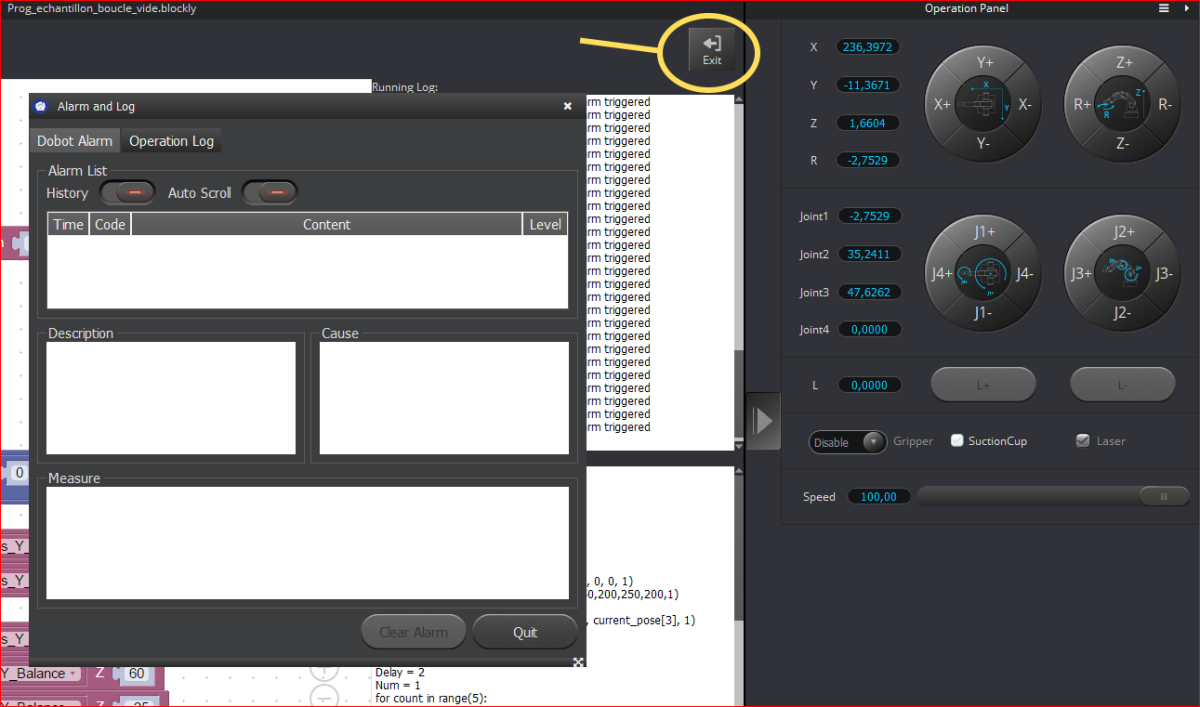
6- Vous pourrez Dégager le bras par les boutons de droite pour sortir de la zone de sécurité
_________________________________________________________________________________________________________________________________________________________________________________________________________________
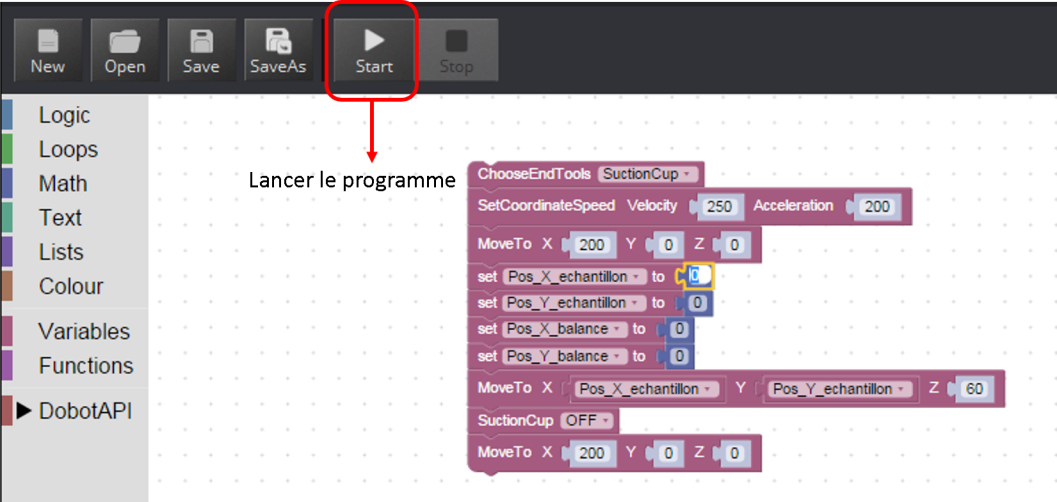
Lancer le programme et vérifier que le bras robotisé, se place dans sa position initiale (x=200, y=0, z=0), puis que celui ci se place au dessus du premier échantillon avant de revenir en position initiale.
Complément : Utilisation de l'application Blocky - étape 2
Suivre la procédure pour programmer un second mouvement au bras robotisé.
1 - Tout d'abord cliquer avec le bouton gauche sur la commande MoveTo
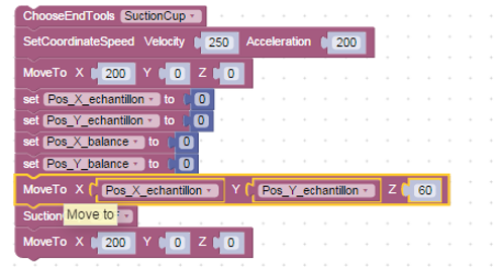
2 - Faire un copier coller de la commande (A partir du clavier ctrl+c puis ctrl+v ou bien de l'onglet clic droit de la souris copier puis coller)
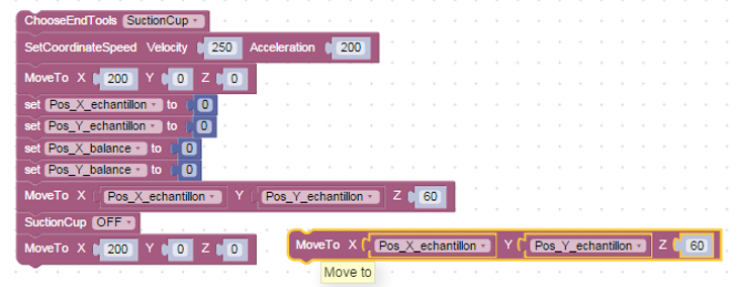
3 - Glisser la nouvelle commande entre la commande MoveTo et SuctionCup en positionnant le curseur de la souris sur la nouvelle commande et en maintenant le clic gauche de la souris.
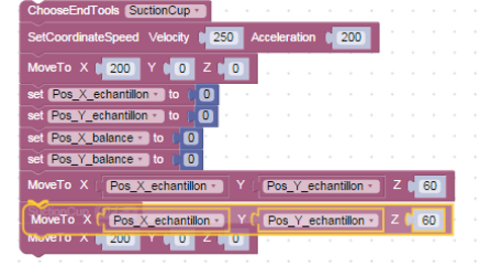
4 - Enfin modifier la coordonnées Z du bras robotisé pour l'amener à la surface de l'échantillon soit la position 2
Lancer le programme et vérifier que le fonctionnement répond à vos attentes.
Complément : Utilisation de l'application Blocky - étape 3
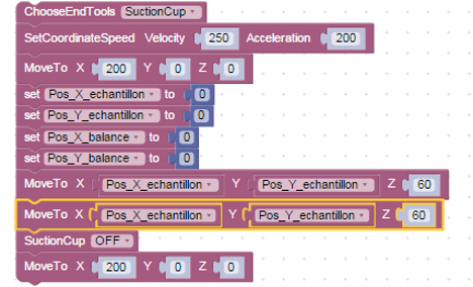
Q11) Ajouter autant de commandes MoveTo que nécessaire afin que le mouvement du bras robotisé reproduise les mouvements visibles sur la vidéo.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
Complément : Utilisation de l'application Blocky - étape 4
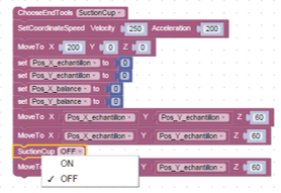
Une fois que les mouvements du bras robotisé sont programmés, programmer la mise en marche de la ventouse. Pour ce faire ajouter par un copier-coller la commande et activer ou désactiver celle-ci.
Enfin ajouter un délai entre le moment où le bras dépose l'échantillon sur la balance et le moment où il reprend l'échantillon pour le redéposer à sa place initiale.
La commande délai ou delay en Anglais se trouve dans l'onglet DobotAPI
Q12) Après amélioration et optimisation du programme, vérifier que le fonctionnement du bras robotisé est similaire au fonctionnement du bras sur la vidéo.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.