3 / Décomposition séquentielle du fonctionnement du bras robotisé en mode d'apprentissage :
Introduction au diagramme de séquence
Lire la ressource sur le diagramme de séquence puis répondre aux questions suivantes :
Q6) Citer les trois types de messages intervenant dans un diagramme de séquence.
Q7) Pour chaque type de flèche, indiquer le type de message correspondant et indiquer si ce message attend une réponse.
Diagramme de séquence du bras robotisé en mode d'apprentissage - Enregistrement d'une position
Pour comprendre comment un robot peut apprendre il faut comprendre comment il fonctionne en mode apprentissage.
Nous vous proposons ici de décrire son fonctionnement à partir d'un diagramme de séquence.
Nous nous intéressons à la procédure permettant au robot d'apprendre une position.
Q8) Compléter le diagramme de séquence dans le cas d'utilisation suivant : Apprentissage d'une position par le bras robotisé en mode apprentissage.
Pour ce faire relire la procédure de prise en main de l'application Teaching and Playback en vous concentrant sur la partie 2 et 3
Réponses possibles :
Manipule le bras pour indiquer une position
Envoie la position articulaire du bras

Q9) Écrire sous la forme de phrases la séquence précédente :
• 1 : Demande synchrone de l'utilisateur vers l'ordinateur pour lancer l'application.
• 2 : Attente de l'utilisateur du lancement de l'application par l'ordinateur.
• 3 :
Diagramme de séquence du bras robotisé en mode apprentissage - Enregistrement de plusieurs positions
Pour permettre au système d' apprendre plusieurs positions, il est essentiel de lui faire répéter la même procédure d'apprentissage.
Ainsi tant que l'action d'apprentissage n'est pas terminée le bras robotisé attend que l'utilisateur manipule le bras pour lui indiquer une nouvelle position à apprendre.
Pour rendre compte de la répétition de la même action dans un diagramme de séquence il est possible d’utiliser la notion de boucle.
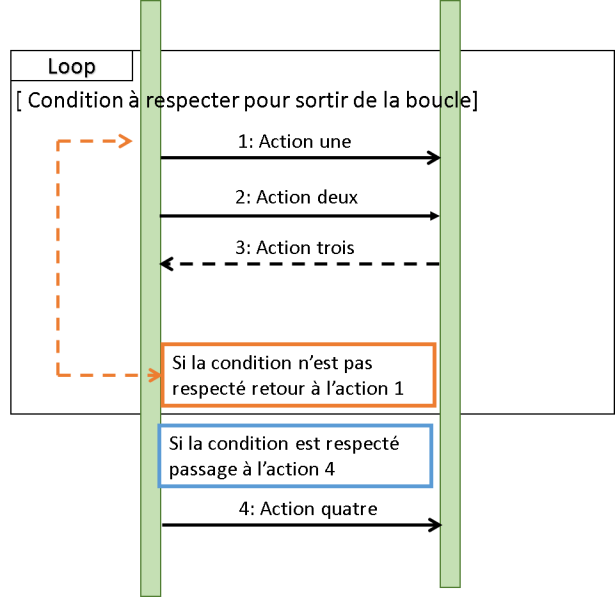
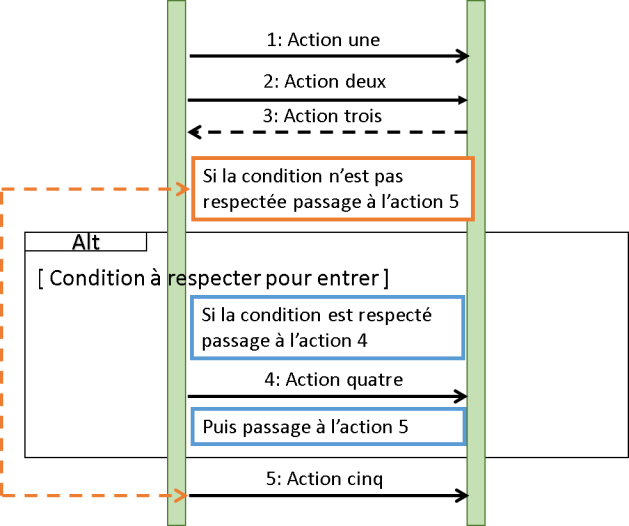
Diagramme de séquence du bras robotisé en mode apprentissage - Enregistrement de plusieurs positions et lancement des mouvements appris
Il est possible de lancer à tout moment les mouvements appris par le robot, mais à la condition que l'utilisateur appuie sur la touche Start.
Pour rendre compte d'une condition à respecter pour lancer une action, il est possible d'utiliser la notion Alt ou Alternative. Contrairement à une boucle cette fois-ci c'est pour rentrer dans Alt qu'il faut respecter une condition