c - Simulation de la chaine de puissance pour la hauteur des capteurs
Le principe.
La simulation grâce à Matlab simulink va nous permettre de voir le comportement de la partie convertir et transmettre en fonction de grandeurs physiques comme :
la durée et l'amplitude du signal d'alimentation du moteur ;
2 paramètres moteur appartenant au motoréducteur ;
le rapport de transmission du réducteur du motoréducteur ;
un train d'engrenage additionnel si nécessaire avec un rapport de transmission et un rendement de 90% ;
un mécanisme envisagé pour l''élévation des capteurs.
Les hypothèses simplificatrices :
pertes mécaniques quasiment nulles au niveau du moteur ;
pour le mécanisme on considérera la masse de la partie levage comme nulle, ce qui impose un centre de gravité de l'ensemble "mecanisme + charge" correspondra à celui de la charge ;
tous les frottements au niveau des liaisons pivots sont considérées comme nulles.
Conseil :
Télécharger sur le bureau ou dans votre espace réservé le fichier compressé « SimulinkProjets_capteurs.zip ».
Décompresser le fichier « SimulinkProjets_capteurs.zip » sur votre bureau (ne pas oublier de supprimer en fin de séance).
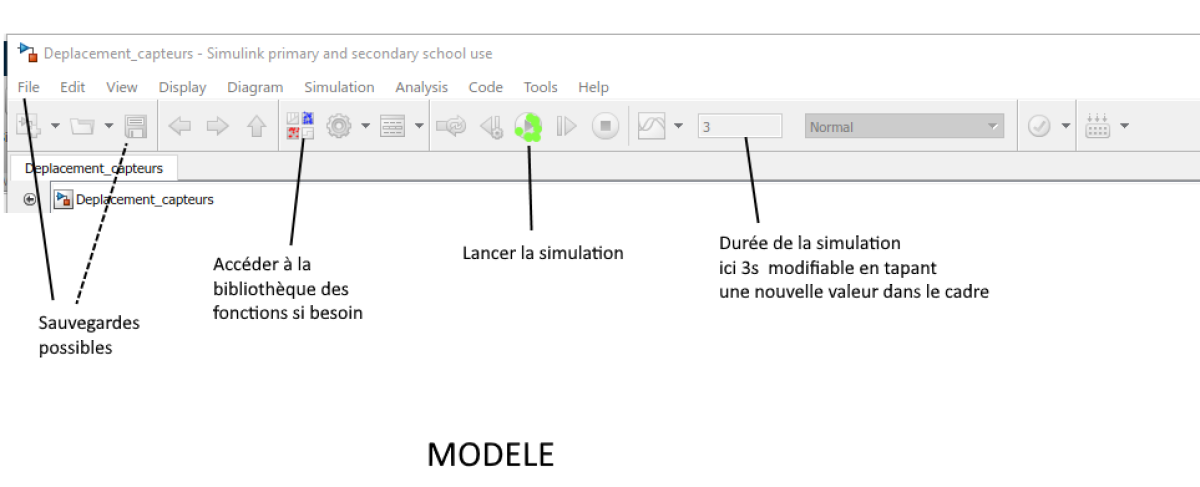
Ouvrir le fichier « Deplacement_capteurs.slx » avec MATLAB- simulink version R2018b.
Patienter le temps que MATLAB- simulink version R2018b s'ouvre ( il y aura deux étapes qui peuvent durer 2min).
Méthode :
Documenter les valeurs moteurs à partir de la tension d'alimentation et l'intensité du courant le rotor bloqué. Pour cette situation nous pouvons déduire la valeur de la résistance en Ohm : \(\mathbf { \large {R=\frac{U}{I_{\text{rotor bloqué}}}}}\)
Pour l'autre valeur K en « V/rad·s-1» ou « Nm/A », le calcul peut être fait ainsi en tenant compte du réducteur associé au moteur : \(\large {K=\text{rapport de transmission réducteur} \times \frac{Umot - R \times I}{(\frac{\pi}{30} \times \text{n}_{s reduct})}}\)
ns reduct pour le point à vide est la fréquence de rotation donnée en tours/min ou « Revolution per minute » (RPM) en sortie du réducteur
\({I}\) est aussi l'intensité du courant à vide ;
\({Umot}\) est la tension nominale de fonctionnement du moteur.
le rapport de transmission vous est donné sous la forme 1/50 (ou 50 :1 ) par exemple ce qui donnera = 0,02
Le rendement du réducteur associé au moteur a un rendement assimilable à (0,95)nbre d'étages
La longueur entre l'axe moteur et les capteurs peuvent vous être donnés par votre équipier assurant l'assemblage des pièces pour les capteurs.
Vous pourrez minimiser cette longueur pour prendre en compte les masses des élément mécaniques intermédiaires du bras, tout en augmentant la masse.
Un deuxième réducteur peut être mis en service. le rapport de transmission et son rendement doivent égal à 1 pour ne pas être pris en compte.
La tension alimentant le moteur se fait sous forme d'impulsion de durée plus ou moins longue, l'impulsion commence à t=0s et la fin de l'impulsion se règle par le rectangle vert.
Toujours dans ce rectangle vert on peut ajuster la tension qui est fixée à 12V mais qui sera à ajuster à votre moteur.
Quelques détails sur la fenêtre Matlab Simulink et sur les scopes qui permettent de voir et de mesurer des signaux
Vous avez des ressources dans STI2D
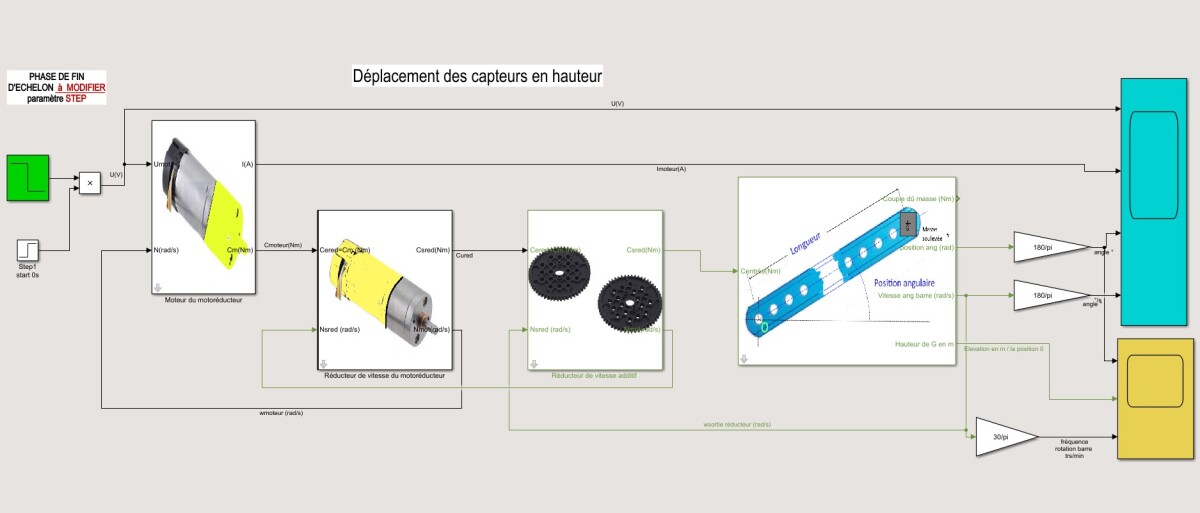
Le menu simulink autorisant une modélisation graphique du système
En double cliquant sur les scopes une fois la simulation lancée.
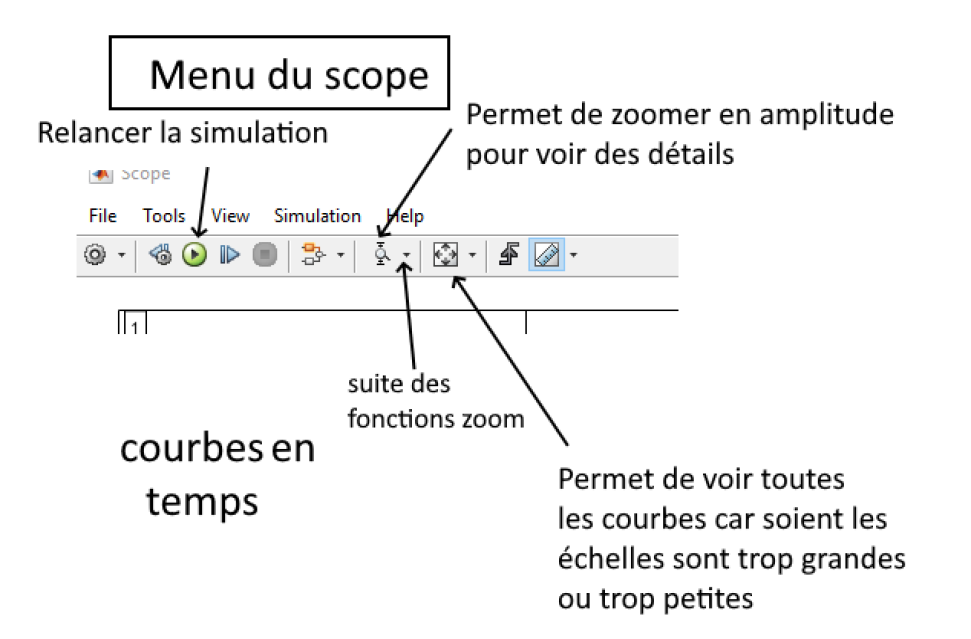
Menu sur un scope avec les courbes
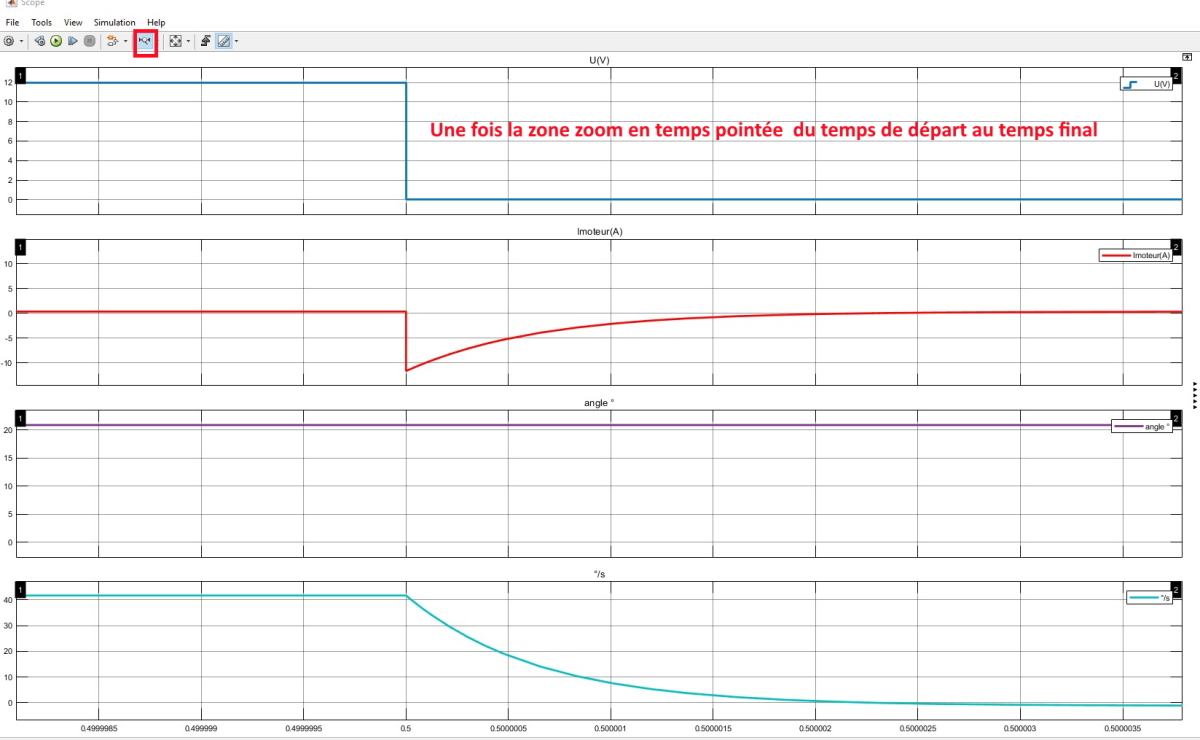
Exemple de l’utilisation des fonctions Zoom
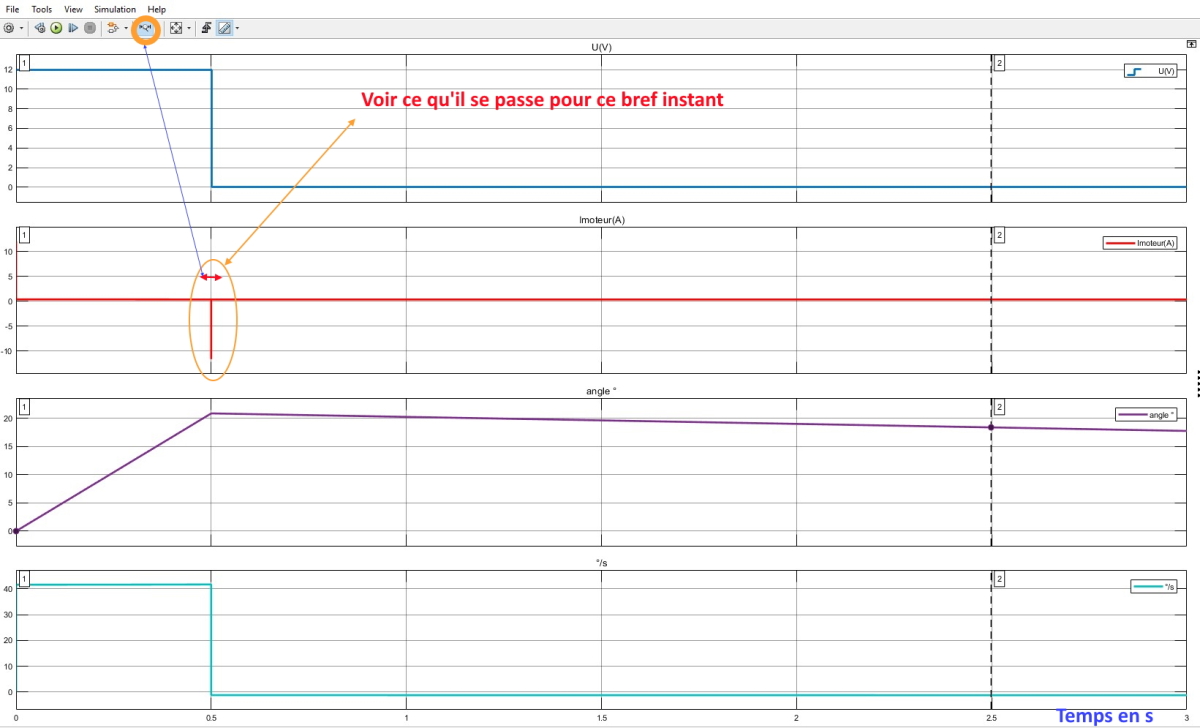
Une fois la fonction Zoom sélectionnée un temps de départ séléctionné et bouton de la souris maintenu jusqu'au relâchement