a - Motorisation de la détection
L'activité consiste à justifier le choix du motoréducteur pour entraîner en rotation le bras qui supporte les capteurs, de préciser les valeurs de cette partie de la chaîne de puissance.

Travail à faire :
1- Dimensionnement du motoréducteur
Le choix de cette solution technique, qui vous est imposée pour la suite du travail, permet de valider une solution classique et de vérifier des calculs.
Données :
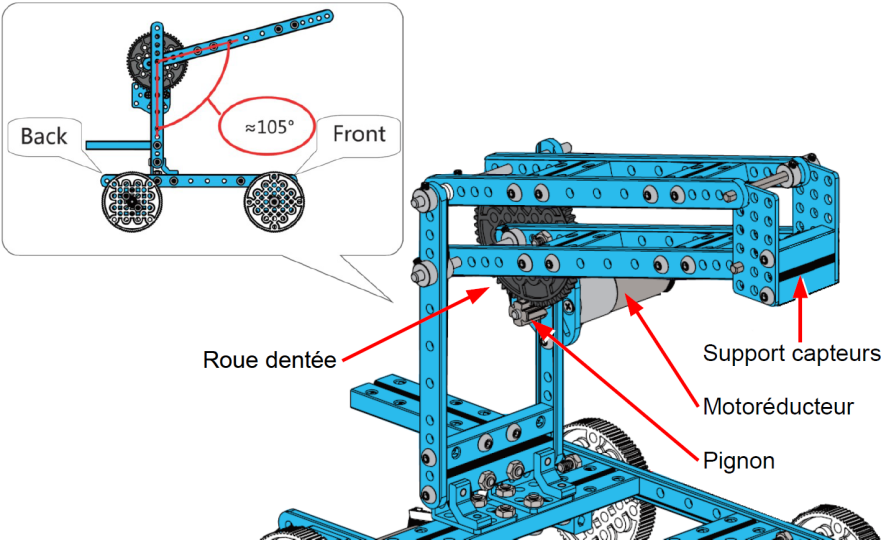
La vitesse de rotation du bras : 105° en 5 secondes
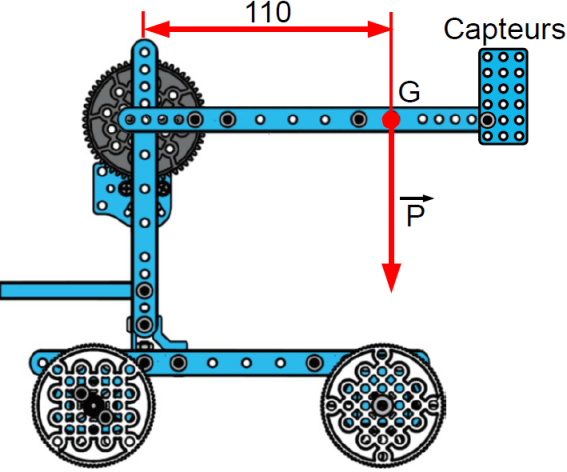
masse de l'ensemble bras + capteurs : 300g
Position du centre de gravité « G » de l'ensemble bras + capteurs par rapport à l'axe de rotation : 110 mm
![]() CALCULER le poids « P » de l'ensemble au point « G »
CALCULER le poids « P » de l'ensemble au point « G »
| Le poids |
![]() CALCULER le couple « C2 » exercé par l'ensemble bras + capteurs sur la roue dentée.
CALCULER le couple « C2 » exercé par l'ensemble bras + capteurs sur la roue dentée.
![]() CALCULER la fréquence de rotation de l'ensemble bras + capteurs en tr/min « N2 ».
CALCULER la fréquence de rotation de l'ensemble bras + capteurs en tr/min « N2 ».
![]() CALCULER le rapport de transmission pignon/roue dentée « R »
CALCULER le rapport de transmission pignon/roue dentée « R »
![]() CALCULER la fréquence de rotation en sortie du motoréducteur « N1 ».
CALCULER la fréquence de rotation en sortie du motoréducteur « N1 ».
![]() CALCULER le couple en sortie du motoréducteur « C1 ».
CALCULER le couple en sortie du motoréducteur « C1 ».