Les mouvements
Généralitées
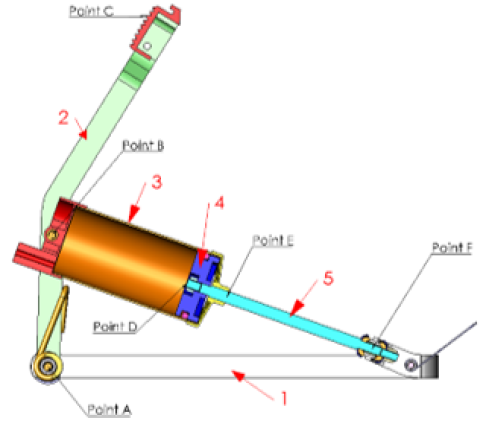
Le système ci-contre représente une pompe à pied. La pédale(2), actionnée par l'utilisateur, est articulée sur le bâti au point (A).
Le piston (4) repousse l'air en coulissant dans le cylindre(3).
Le ressort ramène le système à sa position de départ lorsque l'utilisateur relâche la pression du pied.
Hypothèses
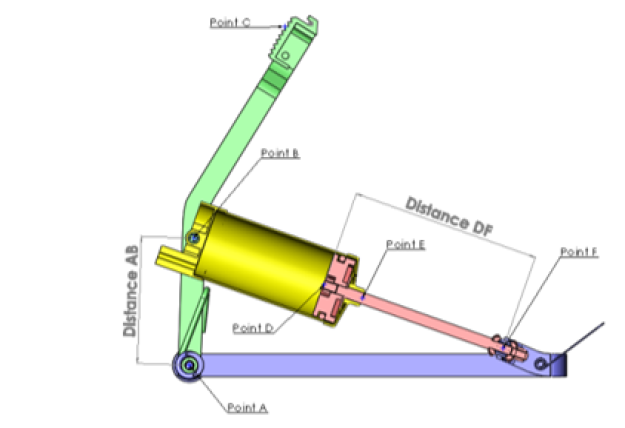
Les solides (classe d'équivalence) conservent leurs dimensions au cours de leur déplacement, ce qui sous-entend que la distance entre deux points appartenant à un même solide ne varie pas.
Sur la figure ci-contre quelques exemples, il va de soi que d'autres combinaisons sont possibles AC, BE, DF, .... Etc.
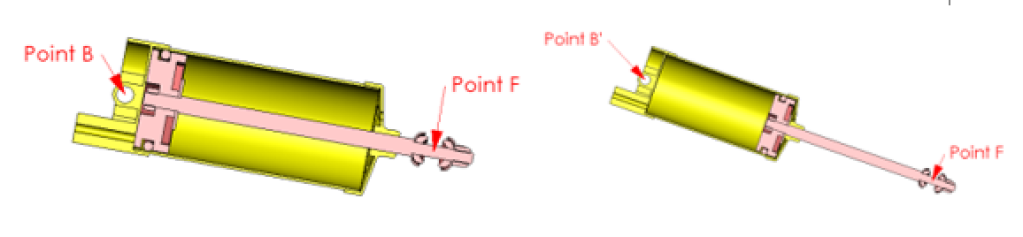
Sur les dessins ci-contre, la distance entre B et F varie au cours du temps, l'hypothèse précédente ne se vérifie pas car le point B et le point F appartiennent à deux classes d'équivalence différentes.
- B appartient au corps du vérin 3.
- F appartient à la tige 5.
BF ≠ B'F
Types de mouvements
Un solide est en mouvement quand sa position par rapport à un point fixe (référence) varie au cours du temps. Ce solide peut être animé de mouvement particulier :
- soit un mouvement de « Translation »
. (Piston [4] / cylindre [3])
- soit un mouvement de« Rotation »
. (Pédale [2] / Bâti [1])
- soit un mouvement« Plan »
qui est une combinaison des deux précédents. (Cylindre [3] / Bâti [1])