Le type 1, qui correspond au vissage d'une vis dans un taraudage, et le type 4 qui correspond par exemple ŕ l'assemblage d'un écrou sur un goujon, ne sont pas étudiés dans ce chapitre. Les types 2 et 3 correspondent ŕ des transformateurs de mouvement pour lesquels existent des solutions industrielles. | La représentation | | Animation | Schéma cinématique | Commentaires | 
| 
| 
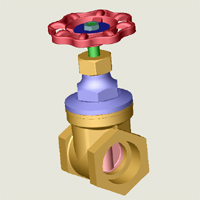
| Dans le cas général c'est la vis qui est motrice et l'écrou, ne pouvant pas tourner, se translate parallčlement ŕ l'axe de la vis. On peut voir une situation de ce type dans l'exemple de la vanne ou du vérin électrique.Si la liaison hélicoďdale est réversible on peut avoir l'écrou moteur. C'est le cas dans le tournevis Géfom présenté dans les exemples. | 
| 
| 
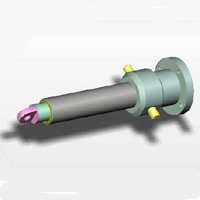
| Dans le cas le plus général des solutions correspondant ŕ ce principe cinématique, c'est l'écrou qui est moteur. L'écrou ne pouvant se déplacer en translation c'est la vis qui, bloquée en rotation, se translate. |
Les caractéristiques géométriques | La relation qui lie le déplacement angulaire de l'élément en rotation (Q en radians), au déplacement rectiligne de l'élément en translation (d en m) est : d = p . Q /2 (avec p le pas en m) La relation qui lie la vitesse de rotation w (en rad/s) de l'élément mobile en rotation et la vitesse linéaire V (en m/s) de l'élément mobile en translation est : V = p. w / 2 p (avec p le pas en m) |
|