Le pilotage du moteur synchrone, brushless ŕ aimants permanents ou moteur ŕ rotor bobiné, se fait en jouant sur l'amplitude du courant et le décalage entre le champ statorique et le champ rotorique pour la commande du couple et sur la fréquence du courant pour la vitesse (liée ŕ celle du champ tournant). Il est donc indispensable, pour positionner le champ statorique par rapport au champ rotorique, de connaître ŕ chaque instant la position du rotor.
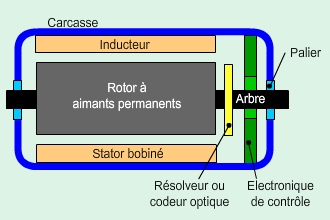
Un capteur (codeur ou résolveur) détecte la position exacte du rotor et permet au convertisseur de fréquence, de maintenir un angle de 90° entre le champ tournant statorique et le champ rotorique, de façon ŕ ce que le couple moteur puisse toujours ętre maximal. Le champ statorique, modulé en amplitude, détermine la valeur du couple. Il n’y a plus possibilité de décrochage. Le capteur donne également l’information " vitesse ". Fonctionnement ŕ vitesse constante : si la charge diminue, pour que la vitesse reste constante, il faut diminuer le couple moteur. Le variateur réduit donc l’amplitude du champ tournant statorique, sans changer sa fréquence. Fonctionnement ŕ couple constant : si la consigne de vitesse diminue, le couple moteur reste constant si l’amplitude du champ tournant statorique reste constante. Le variateur réduit la fréquence du champ statorique, en conservant son amplitude.
|