2. Modélisation d'une force (ou résultante)
Définition
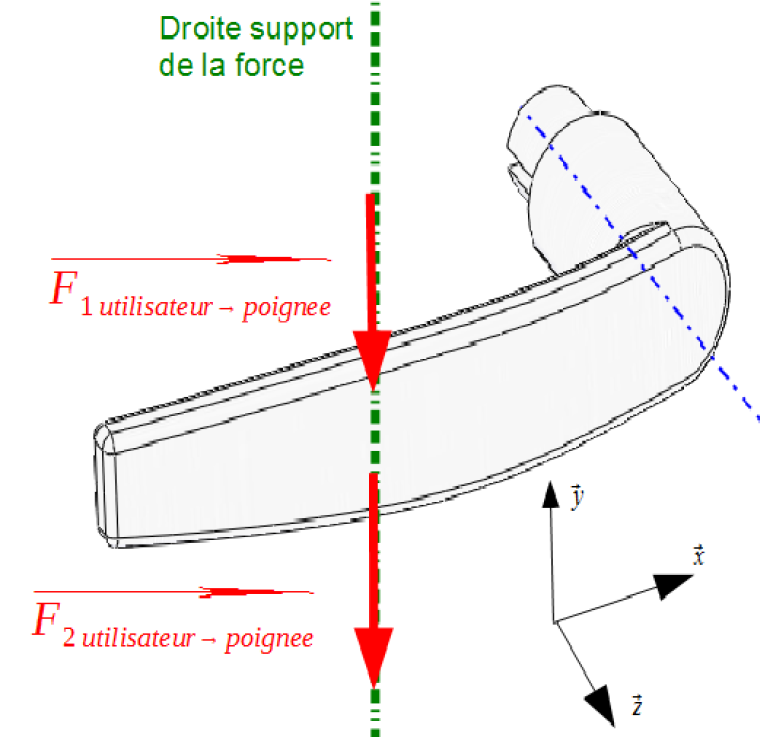
Une force, ou sa résultante, est modélisée par un vecteur glissant sur sa droite support : les forces \(\overrightarrow{F_{1utilisateur \rightarrow poignee}}\) ou \(\overrightarrow{F_{2utilisateur \rightarrow poignee}}\) produisent les mêmes effets, leur modélisation sera identique.
Modélisation
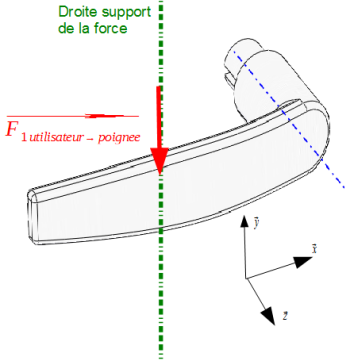
Le vecteur force dans sa modélisation doit préciser "qui agit sur
qui" : Ici l'utilisateur agit sur lapoignéedonc \(\overrightarrow {F_{utilisateur \rightarrow poignee}}\)On écrit ensuite les composantes (unités S.I : le Newton N) dans le repère (\(\vec{x}\) ,\(\vec{y}\) ,\(\vec{z}\) ) : \(\overrightarrow {F_{utilisateur \rightarrow poignee}}= \left( \begin{array}{c}0 \\-F \\ 0\\\end{array} \right) \)ou \(\overrightarrow {F_{utilisateur \rightarrow poignee}}= 0 \vec{x} -F \vec{y} +0 \vec{z}\).
Remarque :
Une force exercée sur un système tend à générer un mouvement de translation.