3. Modélisation d'un moment
Définition
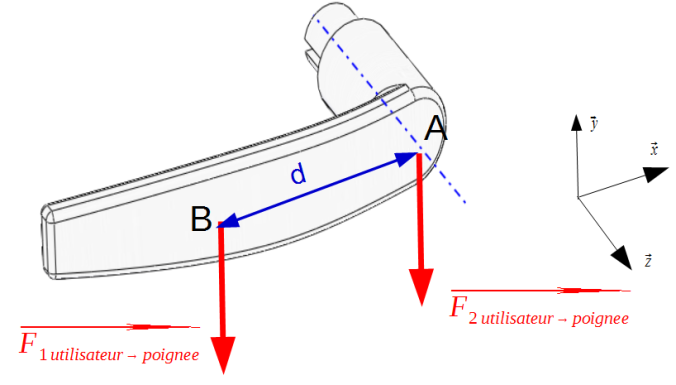
Une force distante d'un axe, crée un moment autour de cet axe. La force \(\overrightarrow {F1_{utilisateur \rightarrow poignee}} \)tend à faire tourner la poignée autour de l'axe (A, \({\vec{z}}\)) mais pas \(\overrightarrow {F2_{utilisateur \rightarrow poignee}} \).
Modélisation d'un moment
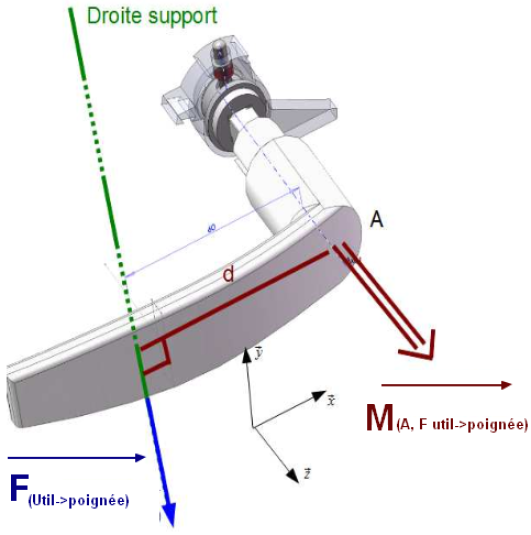
Un moment sera représenté par un vecteur suivant les règles suivantes :
double trait appliqué au point A,
de direction perpendiculaire au plan formé par le point A et la force \({\vec{F}}\) (axe autour duquel aurait tendance à s'effectuer la rotation)
de sens positif si la force F fait tourner le point A dans le sens trigonométrique (de x->y, ou de y->z, ou de z->x) et négatif dans le cas contraire
de norme : M(A,Futil->poignée) = d x F avec d = distance de A à la force F, mesurée perpendiculairement de A à F, encore appelée bras de levier
Notation : \(\overrightarrow {M_{(A,util \rightarrow poignee)}} \left( \begin{array}{c}0 \\0 \\ + d F\\\end{array} \right) \)ou \(\overrightarrow {M_{(A,util \rightarrow poignee)}} =0\vec{x} +0\vec{y} + d F\vec{z}\)
Remarque :
Un moment tend à générer un mouvement de rotation.