Robot Haptique
contenu
menu
navigation
outils
Accueil
Module
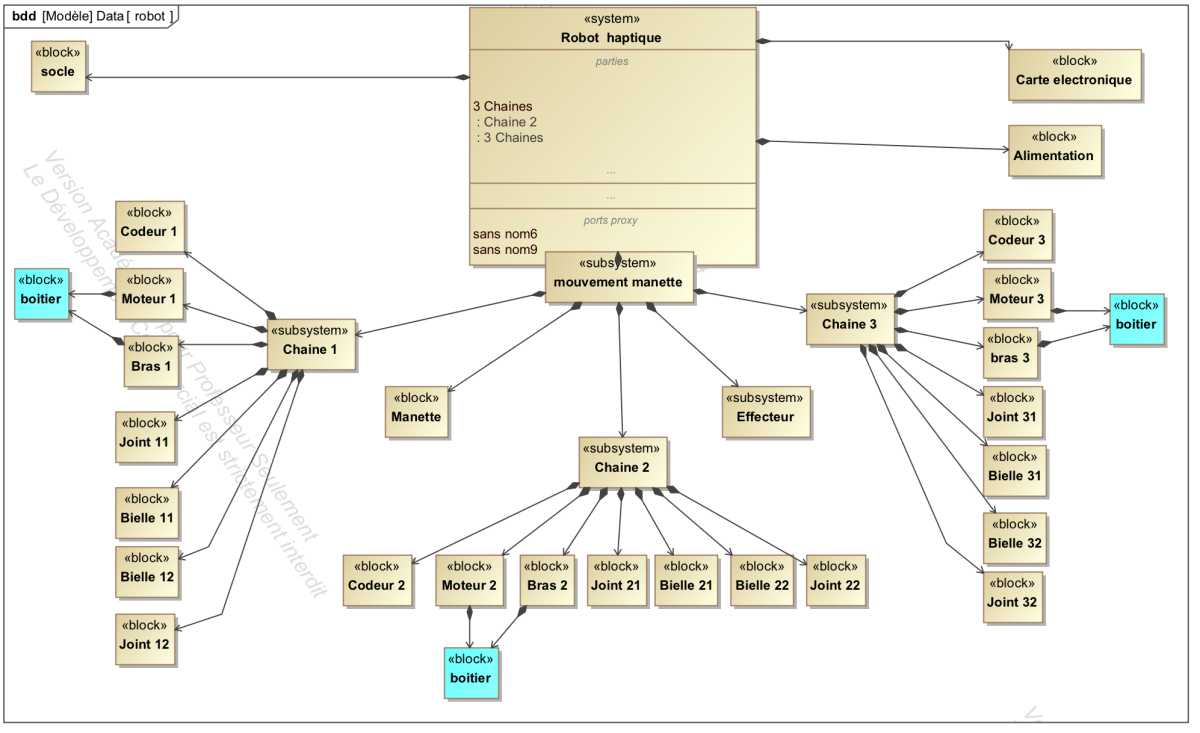
Description SysML structurelle
Diagramme de définition de blocs
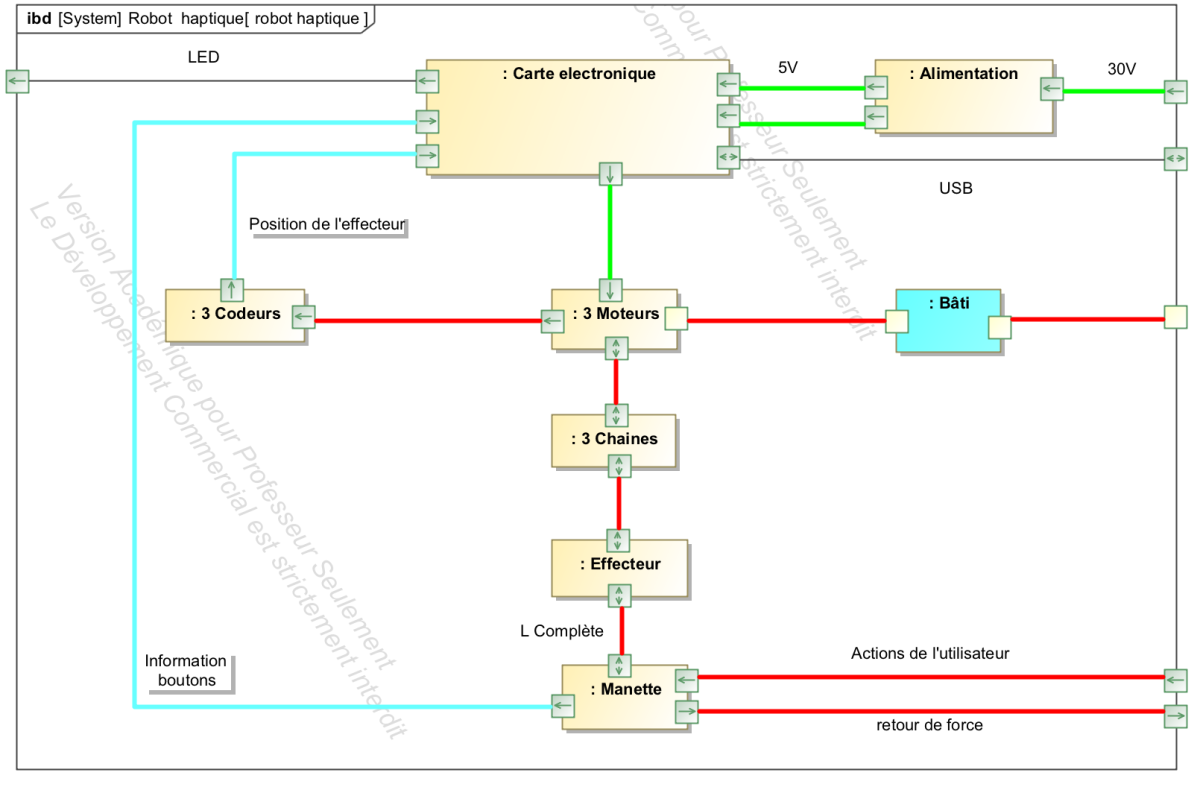
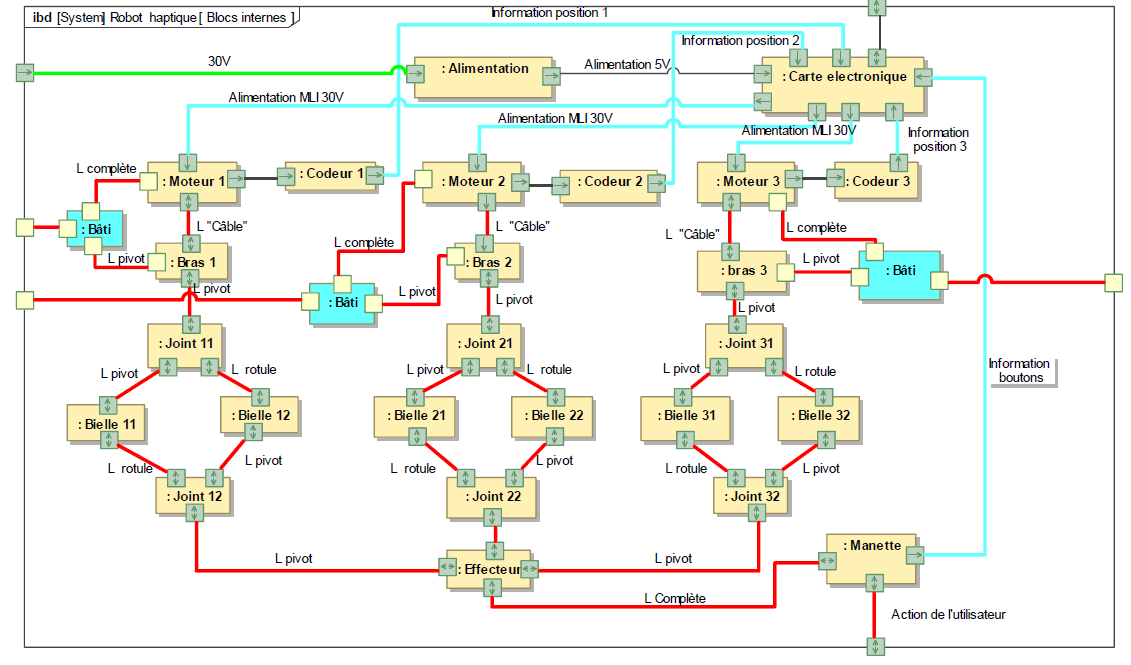
Diagramme de blocs internes
Version simple
Version complète
Précédent
Suivant
Objectifs
Introduction
Positionnement de l'effecteur
Dossier technique
L'haptique : généralités
L'interaction haptique
Mise en œuvre
Description comportementale
Présentation générale
Description structurelle
La chaîne d'information
Les 3 chaînes de puissance indépendantes
Approche matérielle