L'haptique : généralités
Définition : Définition
L'haptique (du grec\(\alpha\pi\pi o \mu\alpha \iota\) qui signifie « je touche ») désigne la science du toucher, par analogie avec l'acoustique ou l'optique. Au sens strict, l'haptique englobe la perception tactile et les phénomènes kinesthésiques, c'est-à-dire la perception du corps dans l'environnement. (WIKIPEDIA)
La perception haptique
La perception haptique met en œuvre à la fois des récepteurs spécifiques et des processus psychophysiologiques. Il est à noter qu’à la différence de la vision ou de l’audition le prélèvement d’information haptique nécessite une interaction « mécanique » avec le support de l’information, donc susceptible de modifier le support.
Les récepteurs de la perception haptique :
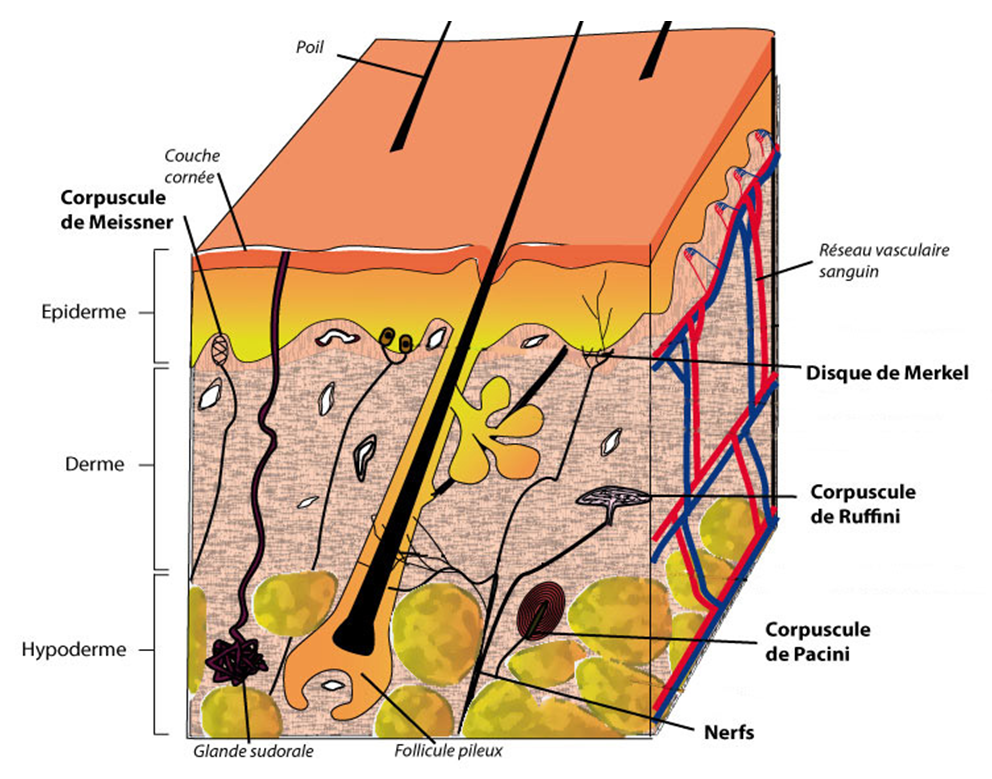
La perception tactile : elle s’effectue au moyen de mécanorécepteurs situés dans la peau.
La peau comporte un grand nombre de mécanorécepteurs : environ 500000 sur tout le corps et 17000 pour les seules parties glabres de la main. Il existe 4 types de mécanorécepteurs situés dans les différentes couches de la peau.
Chaque type permet de percevoir des phénomènes spécifiques :
le toucher léger (disques de Merkel)
la pression (corpuscules de Meissner)
l’élongation (corpuscules de Ruffini)
les vibrations (corpuscules de Pacini)
La perception kinesthésique : elle s’effectue au moyen de mécanorécepteurs situés dans les muscles et les tendons, mais elle a également une composante psychophysiologique car elle relève aussi de la perception de la commande motrice issue du cerveau et de la position, de la vitesse et des efforts ressentis dans les différentes parties du corps.
La restitution de sensations haptiques artificielles
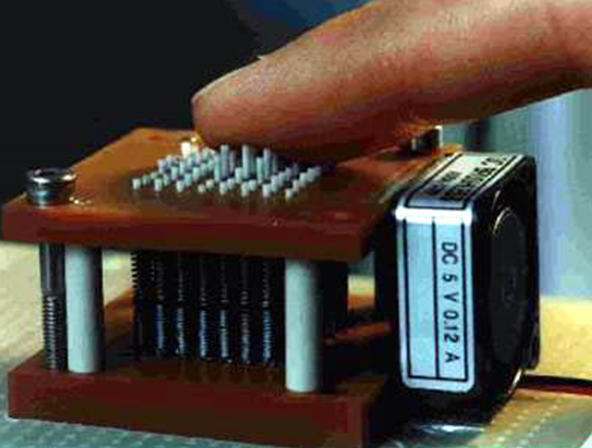
Elle nécessite d’utiliser un dispositif, dit « à retour d’effort », générant des forces dont l’amplitude et la fréquence reproduisent les sensations réelles. Il s’agit généralement d’actionneurs mettant en œuvre des convertisseurs électro-mécaniques de taille variable selon la partie du corps à stimuler : extrémité du doigt (fig 1), main (fig 2), bras (fig 3)…). Sur le plan technologique on rencontre des dispositifs piézo-électriques, à lévitation magnétique, à électroaimants, à moteurs électriques…
Pour enrichir la perception globale d’une réalité virtuelle on peut combiner différents « canaux » sensoriels : par exemple haptique + visuel + auditif…


Remarque :
Le rendu haptique nécessite des performances en fréquence de boucle assez élevées, de l’ordre de 1kHz. Par comparaison une boucle visuelle nécessite une fréquence de 25 à 50Hz. En terme de force, selon le type d'interface haptique, la valeur a générer est de quelques N pour un touchpad, d'une dizaine de N pour une manette de jeu et peut atteindre plusieurs centaines de N pour un exosquelette.