Modélisation du processus seul
Le but de la manipulation sera de mettre en oeuvre une régulation de température par réseau correcteur.
La commande sera de type « discontinue modulée ».
Modélisation du processus seul
On considère le processus seul (résistances de chauffage du malaxeur) dont :
▪ L’entrée de commande notée \(u(t)\) est une information analogique relative à la sortie du correcteur PID ;
▪ La sortie notée \(\theta(t)\) est la température mesurée par la sonde ;
▪ La température ambiante notée \(\theta_{amb}(t)\) est une entrée de perturbation.
Q1. Représenter un schéma bloc de ce processus seul qui fasse apparaître \(u(t)\), \(\theta(t)\) et \(\theta_{ambt}(t)\).
Fonction de transfert du processus seul
On a relevé l’évolution de la température \(\theta(t)\) suite à un échelon de tension \(u(t)\) égal à 20% de Umax= 230 V :
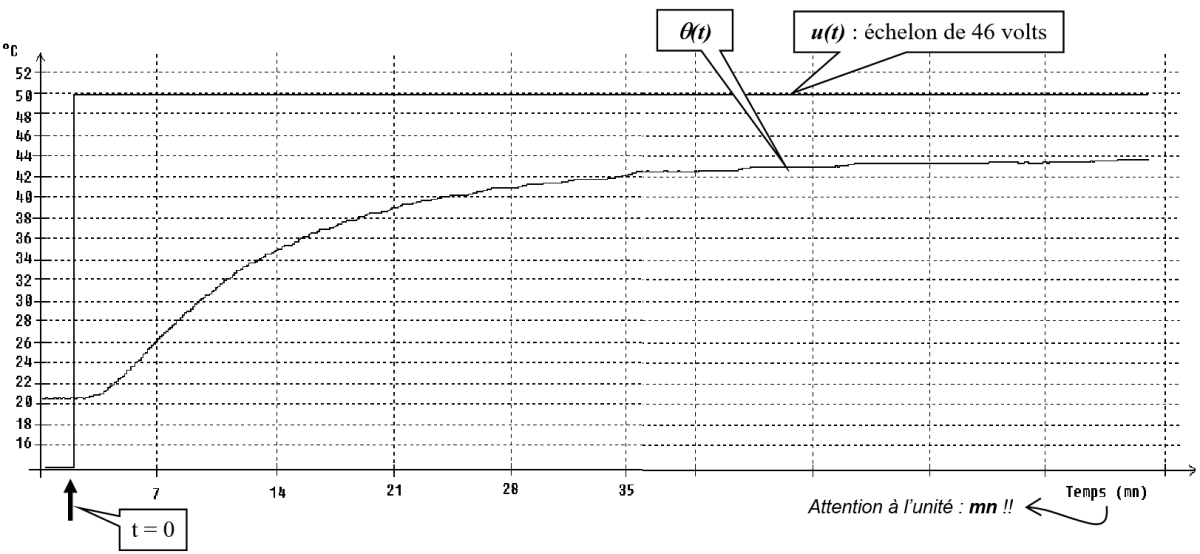
Compte tenu de cette évolution, on peut modéliser le processus par la fonction de transfert suivante (1° ordre avec retard) :
\(H(p)=\dfrac{\theta(t)-\theta_{amb}}{u(t)}=\dfrac{G_S.e^{-Tp}}{1+\tau p}\)
Q2. Appliquer la méthode de Broïda afin de déterminer les valeurs numériques des coefficients \(G_S\), \(T\) et \(\tau\) qui apparaissent dans cette modélisation (attention : \(T\) et \(\tau\) devront être exprimés en secondes !)