Système complet
Modélisation du système complet
La commande du processus précédent est réalisée par un correcteur dont la fonction de transfert est notée .
La tension de commande \(u(t)\) issue de ce correcteur est fonction de l'écart entre la consigne et la mesure noté \(e(t)\), et des paramètres « PID » de ce correcteur.
Q3. Représenter un schéma bloc de cet asservissement (processus + régulateur) qui fasse apparaître \(u(t)\), \(\theta(t)\) et \(\theta_{amb}(t)\), \(\theta_C\) et \(e(t)=\theta_C(t)-\theta(t)\).
Structure du correcteur
On souhaite que le correcteur \(C(p)\) produise une commande \(u(t)\) qui fasse tendre l’erreur \(e(t)\) vers zéro quelle que soit la température .
Q4. Exprimer l’erreur \(e(t)\) en fonction de \(\theta_C\), \(\theta_{amb}\), \(H(p)\) et \(C(p)\).
Q5. Afin que l’erreur statique soit nulle, montrer qu’il est nécessaire qu’il y ait un intégrateur dans le correcteur.
Détermination des paramètres du correcteur
La fonction de transfert d’un correcteur PID peut s’écrire différemment en fonction de la manière dont sont associées les actions élémentaires P, I et D. On parle alors d’association série, parallèle ou mixte.
La structure mixte est la plus courante, c’est aussi celle qui est mise en œuvre dans notre automate Modicom M340. On a alors :
\(C(p)=\dfrac{u(t)}{e(t)}=K_P.\Bigg(1+\frac{1}{\tau_i p}+\tau_d p\Bigg)\)
Méthode d’identification empirique de Broïda :
Cette méthode simple consiste à déterminer les coefficients du correcteur à partir des valeurs numériques du précédent modèle de Broïda (premier ordre avec retard) :
\(H(p)=G_S.\dfrac{e^{-\tau p}}{\theta p+1}\)
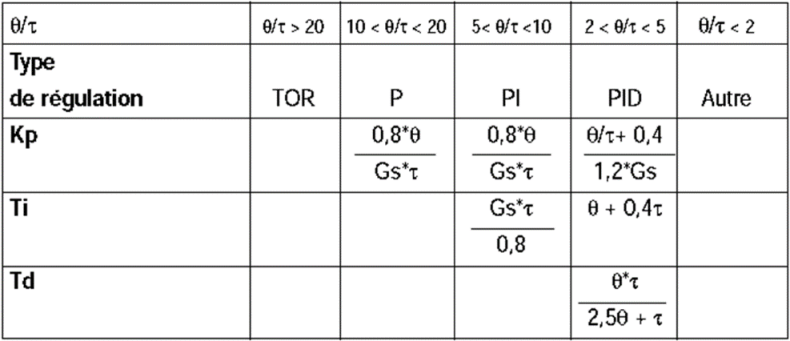
Q6. A partir des précédentes valeurs numériques qui apparaissent dans cette fonction de transfert, déterminer les paramètres d’un correcteur adapté.