Exercice : Challenge
Challenge position du bras
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
Pour ce challenge, il faut modifier la configuration du robot et en particulier la position du bras.
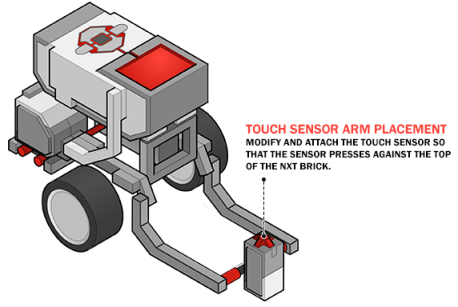
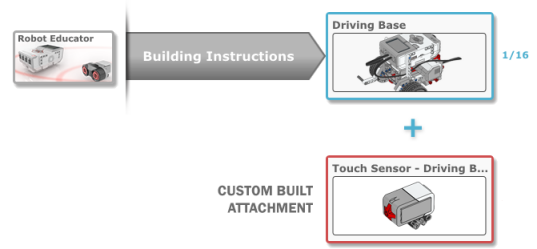
Vous retrouvez les instructions de montage ici.
Dans ce défi, vous allez programmer votre robot EV3 pour qu'il lève son bras lorsque vous appuyez sur le bouton "haut" sur la brique EV3, puis il récupère un conteneur et il le ramene au point de départ.
Règles et procédures
Le bras du robot sera placé dans une position aléatoire avant de commencer.
Vous devez utiliser les pièces disponibles pour modifier le montage du capteur tactile afin qu'il puisse détecter le moment où le bras est en position "haute".
Essayez de le faire avec le moins de changements possible.
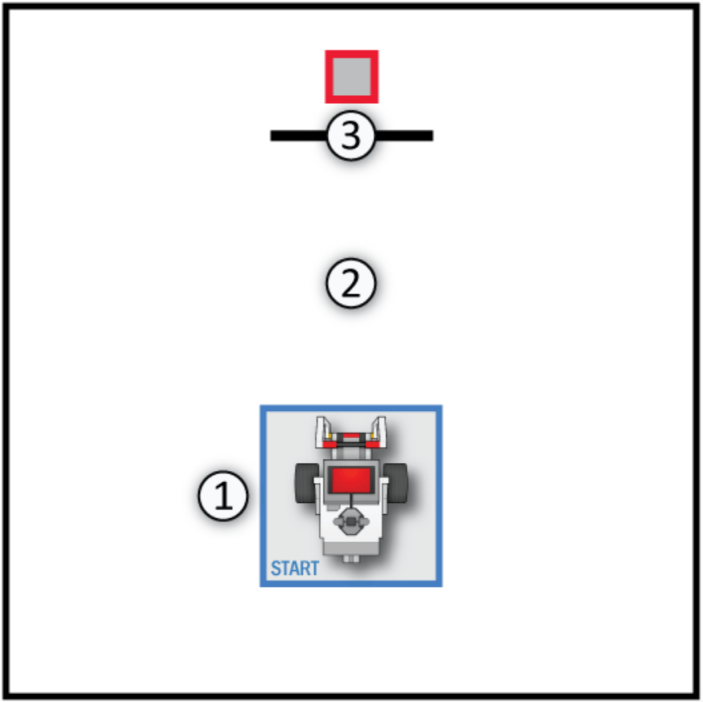
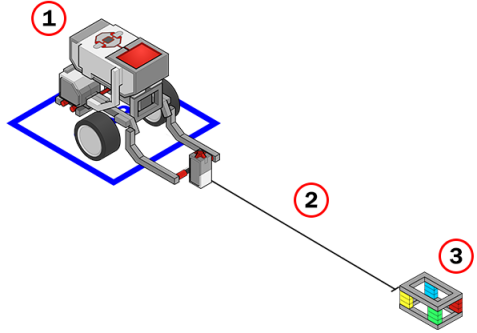
Lorsque le bouton "haut" sur le devant de la brique EV3 est pressée, le robot doit lever son bras à la position "haute" (1), avancer jusqu'à la cargaison (2), et la ramener à la position de départ (3).
Dans ce défi, vous allez programmer le robot pour qu'il déplace le bras dans la position "haute" lorsque le bouton "haut" sur la brique EV3 est enfoncé, peu importe où le bras était initialement. Le robot devra ensuite avancer pour ramasser un conteneur de fret, et le ramener à la position de départ.
En appuyant sur le bouton "haut" sur la brique EV3, le robot soulève le bras de la position basse vers le haut.
Le robot avance jusqu'au conteneur.
Le robot utilise son bras pour prendre le conteneur et recule jusqu'au point de départ.
Question
Programmer votre robot pour accomplir ce challenge.
Indice
Astuce 1: La zone de déclenchement sur le capteur tactile est petite. Vous aurez peut-être besoin de construire un "pare-chocs" à fixer sur le capteur tactile pour détecter le bras de façon plus fiable.
Indice
Astuce 2: Le boîte de l'ensemble EV3 comprend deux capteurs tactiles. Vous pouvez utiliser un capteur pour détecter le bras dans la position "Haute", et l'autre pour détecter la boîte.
FAIRE VALIDER par le professeur avant de passer à la suite.