Bilan "Capteur tactile"
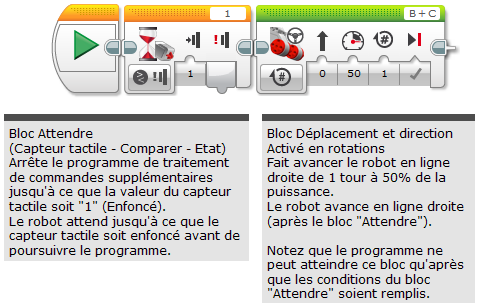
Analyse du programme : Attendre - capteur tactile
Le programme ci-dessous est un exemple de code pour permettre à votre robot d'attendre que le capteur tactile soit enfoncé avant de se mettre en mouvement.
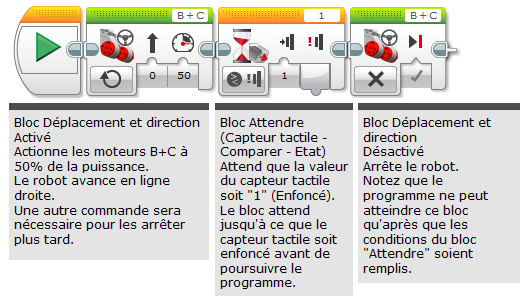
Analyse du programme : Avancer jusqu'au contact
Le programme ci-dessous est un exemple de code pour "Avancer jusqu'au contact". Le robot commence d'abord à se déplacer vers l'avant, et lorsque le capteur tactile est enfoncé, le robot s'arrête.
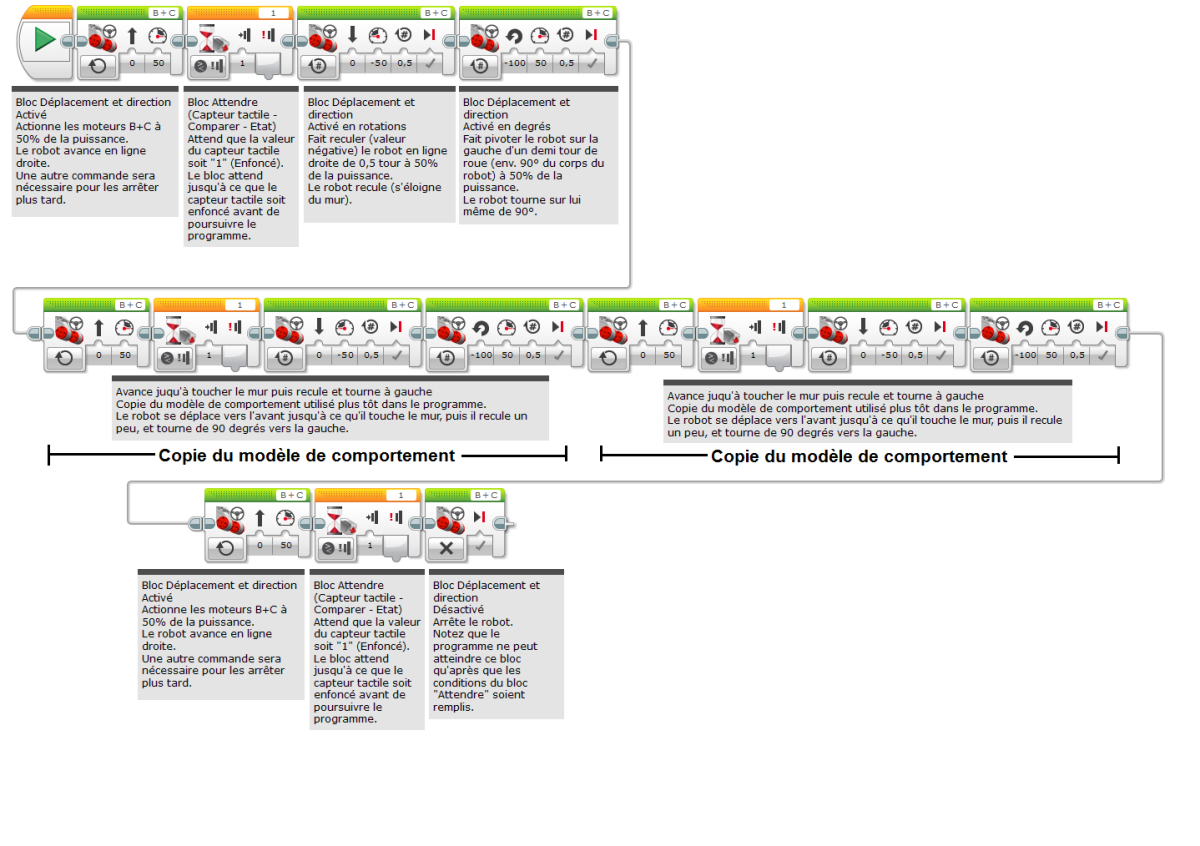
Analyse du programme : Challenge aspirateur
Le programme indiqué ci-dessous est un exemple de solution pour le Mini-Challenge : aspirateur.
La solution réutilise un modèle de quatre blocs, marqué comme «modèle de comportement» ci-dessous. Dans le modèle, le robot se déplace vers l'avant jusqu'à ce qu'il touche le mur, puis recule et pivote de 90 degrés pour faire face au mur perpendiculaire. Comme ce comportement fonctionne pour les quatre murs de la pièce, le programme est un simple "copier-coller" trois fois de plus du modèle de comportement.