Programmation
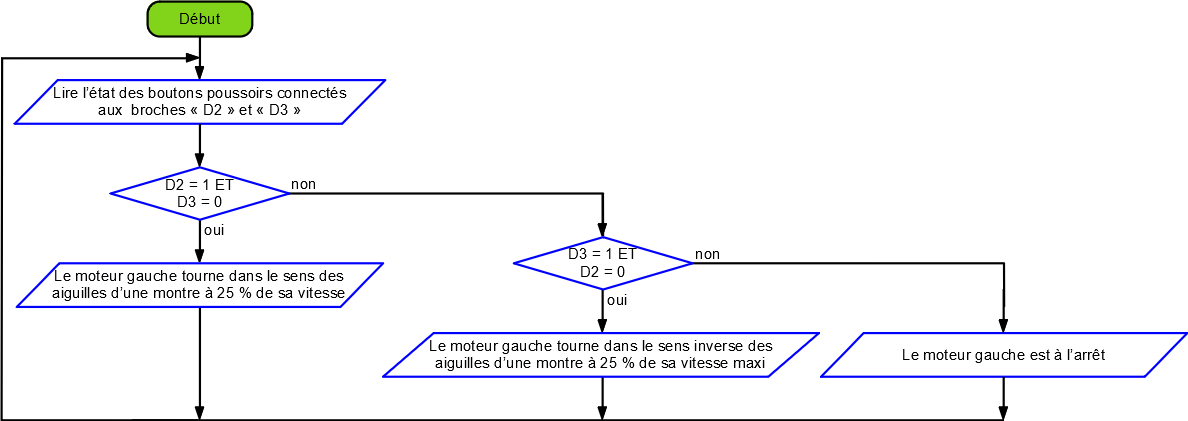
Fonctionnement à programmer
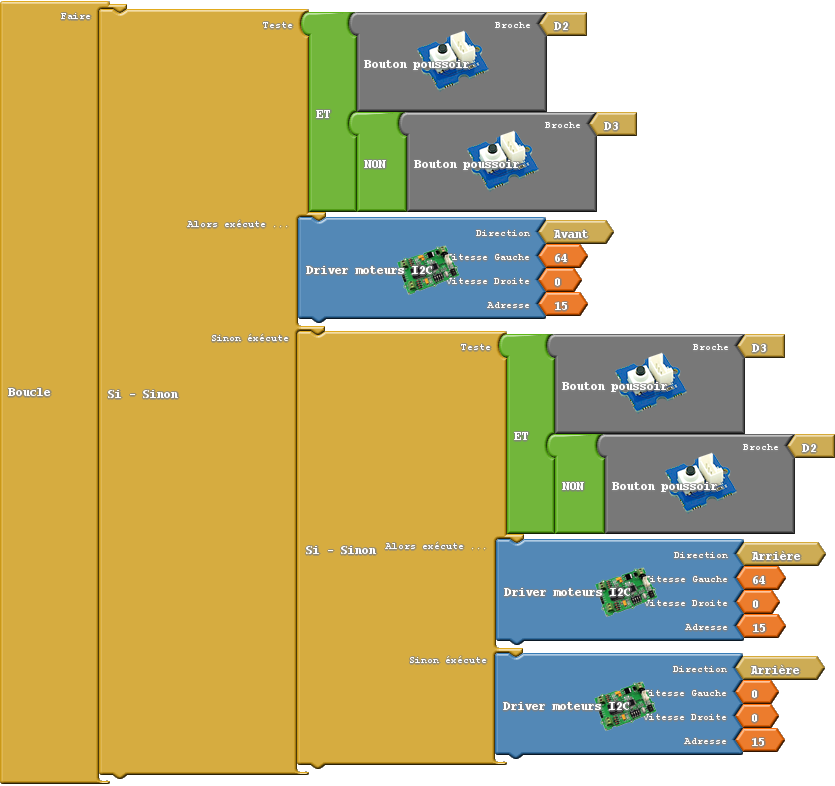
![]() SAISIR le programme ci-dessous.
SAISIR le programme ci-dessous.
Analyse du programme
L'ensemble des blocs sont regroupés dans une « Boucle » pour que l'exécution soit infinie.
« Teste » si le bouton-poussoir sur la broche « D2 » est actif ET pas le bouton-poussoir sur la broche « D3 »
« Alors » le moteur gauche tourne en sens avant à 25% de sa vitesse maxi (64 = 255 / 4)
L'adresse I2C par défaut de la carte est « 15 » pour la carte « Commande I2C de 2 moteurs CC basée sur un driver L298P »
« Sinon »
« Teste » si le bouton-poussoir sur la broche « D3 » est actif ET pas le bouton-poussoir sur la broche « D2 »
« Alors » le moteur gauche tourne en sens arrière à 25% de sa vitesse maxi (64 = 255 / 4)
L'adresse I2C par défaut de la carte est « 15 » pour la carte « Commande I2C de 2 moteurs CC basée sur un driver L298P »
« Sinon » le moteur gauche est à l'arrêt (vitesse = 0)
![]() ENREGISTRER le programme
ENREGISTRER le programme ![]()
![]() TRANSFÉRER le programme dans la carte « Arduino » en cliquant sur l'icône
TRANSFÉRER le programme dans la carte « Arduino » en cliquant sur l'icône ![]()
![]() FAIRE VALIDER le fonctionnement.
FAIRE VALIDER le fonctionnement.
// Adresse I2C par défaut est 0x0fint BP1 = 0;
int BP2 = 0;
void setup() {
Serial.begin(9600);
pinMode(2, INPUT);
pinMode(3,INPUT);
Motor.begin(I2C_ADDRESS);
}
void loop() {
BP1 = digitalRead(2);
BP2 = digitalRead(3);
if (BP1 == HIGH && BP2 == LOW){
// Configuration MOTEUR1, sens, vitesse: -100 à 100Motor.speed(MOTOR1, 50); //SENS AVANT à 50% de la vitesse max
}
else{if (BP2 == HIGH && BP1 == LOW)
{ // Configuration MOTEUR1, sens, vitesse: -100 à 100Motor.speed(MOTOR1, -50); //SENS ARRIERE à 50% de la vitesse max
}
else{Motor.stop(MOTOR1);
}
}
}