6- Simulation Méca 3D
6.1 - Simulation
Après avoir étudié l'étude théorique, il s'agit à présent de simuler un parcours du robot aspirateur avec l'aide du logiciel "MECA 3D".

6.2 -Description de la configuration de la simulation
La simulation va porter sur différents points illustrant ainsi des paramètres cinématiques significatifs, qui seront précisés en fonction des situations à étudier.
6.2.1 -Modèles
Les maquettes numériques CAO, sont réalisées à l’aide du modeleur SolidWorks 2020.
Pour des raisons de simplification des modèles, il est nécessaire de modifier le modèle numérique initial. Cette modification est possible dès l'instant où les liaisons cinématiques entre le mobile et la piste sont respectées.
Dans le cas souhaité, on veut que le mobile suive une trajectoire définie.
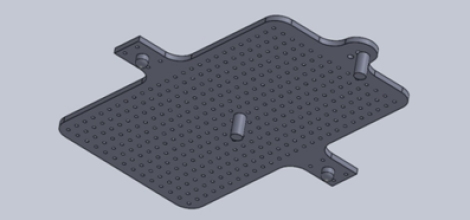
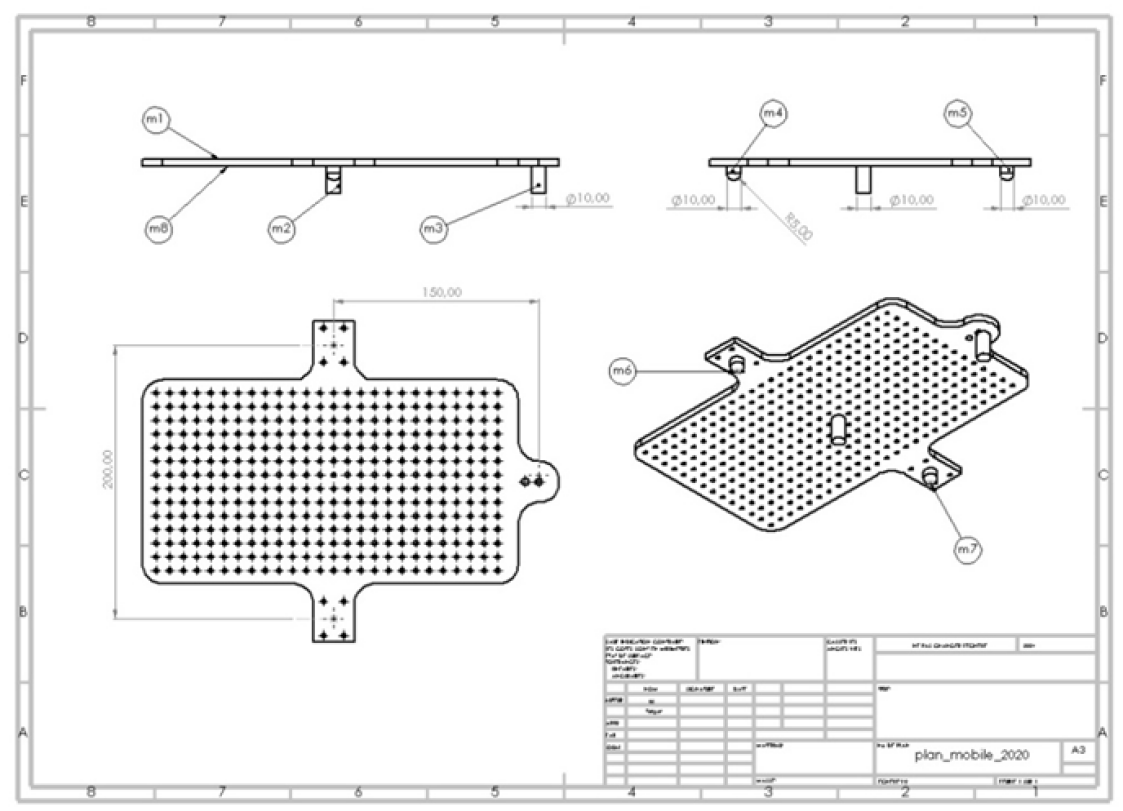
Mobile
Fichier: 02_mobile_mecad3d_2020.sldprt
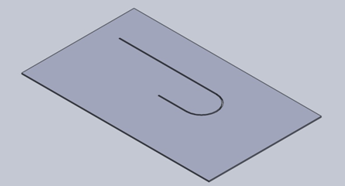
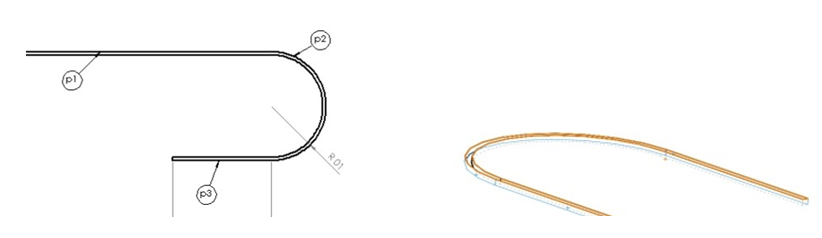
Piste
Fichier: 01_piste_mecad3d_2020.sldprt
Fichiers en téléchargement :
6.2.2 -Description de la configuration de la simulation
Données :
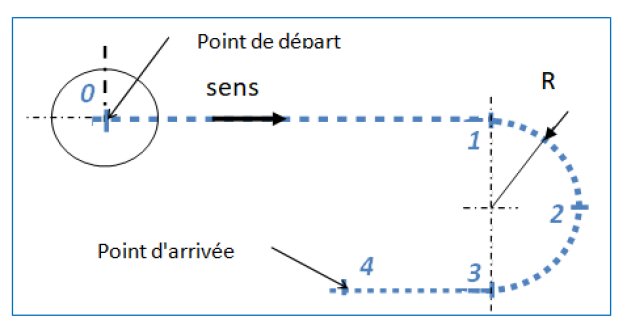
La trajectoire est définie par le plan suivant
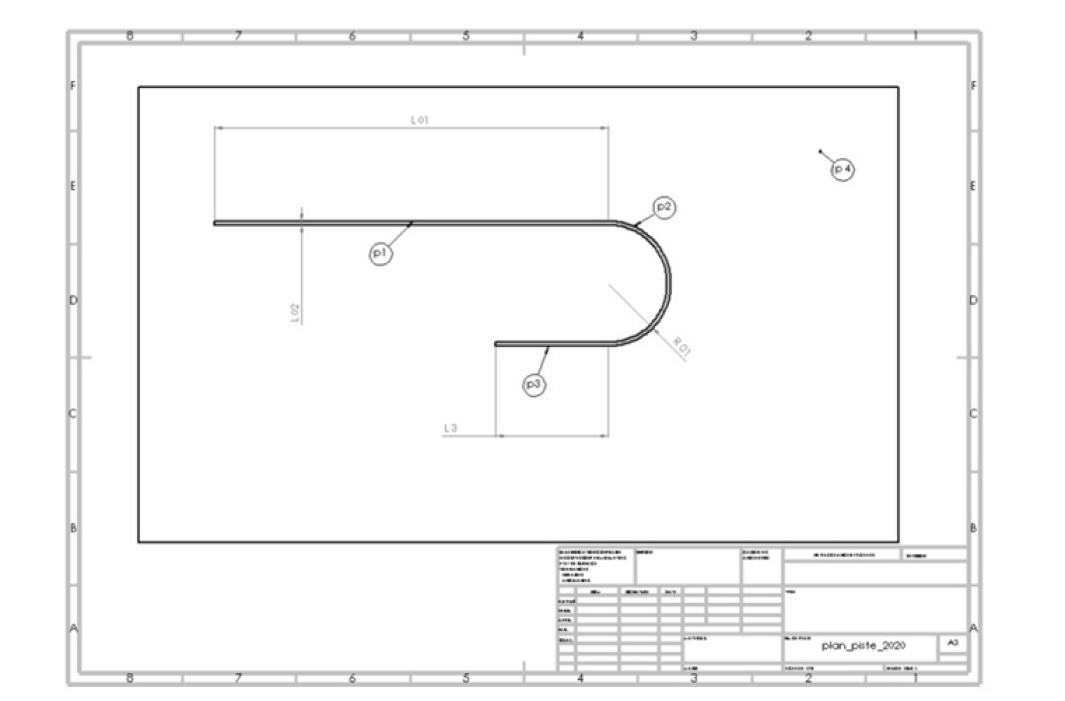
Paramètres:
Longueur en mm:
L 01= 1000
L 02 = 10
L 03 = 300
R traj en mm:
R 01 = 165
Vitesse déplacement en m/s:
V = 0,5 m/s
6.2.3 -Définition des surfaces fonctionnelles
Mobile
Piste
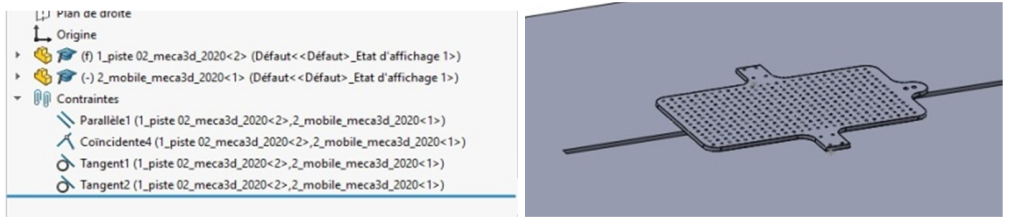
6.2.4 -Définition des contraintes
Dans le logiciel SolidWorks, REALISER l'assemblage au moyen des 4 contraintes définies ci-après :
liaison parallèle entre m1 et p4
liaison coïncidence entre m7 et p4
liaison tangent 1: m3 et p1
liaison tangent 2: m2 et p1
Le résultat à obtenir est visible dans l'arborescence de SolidWorks,
Q11/ SUIVRE la procédure d’utilisation du logiciel « MECA 3d » afin de visualiser par simulation les trajectoires et les vecteurs vitesses de points particuliers sur le mécanisme.
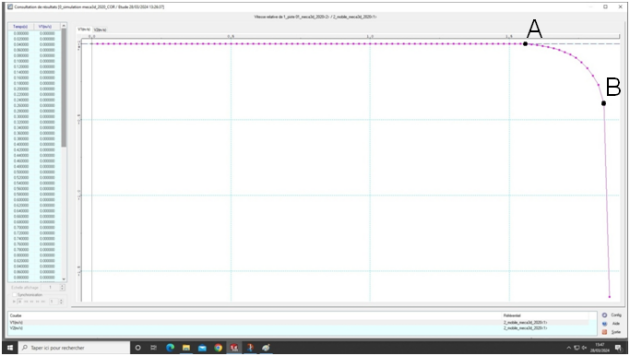
Q12/ RETROUVER le point Oa en le faisant apparaître sur la courbe V(t) ci-dessous.
Q13/ DETERMINER les caractéristiques des points A et B (Position, vitesse) situés sur la courbe V(t) ci-dessous.