Détermination de la vitesse du point F
Schéma cinématique
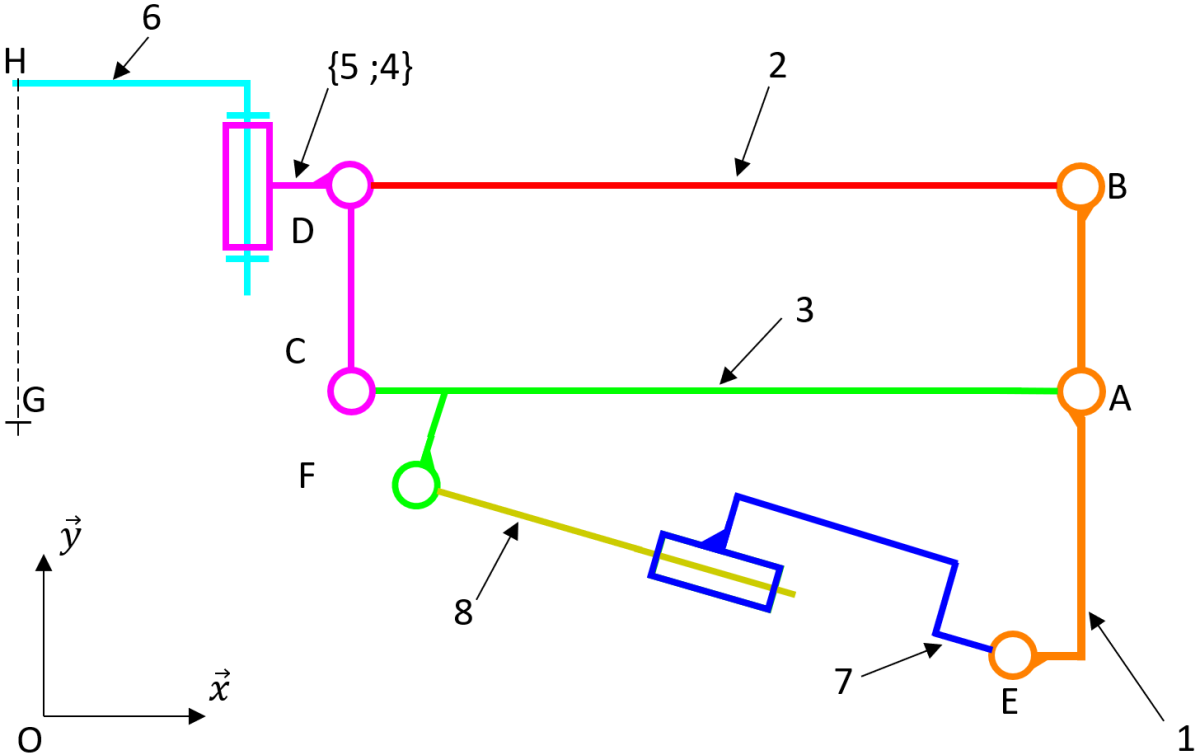
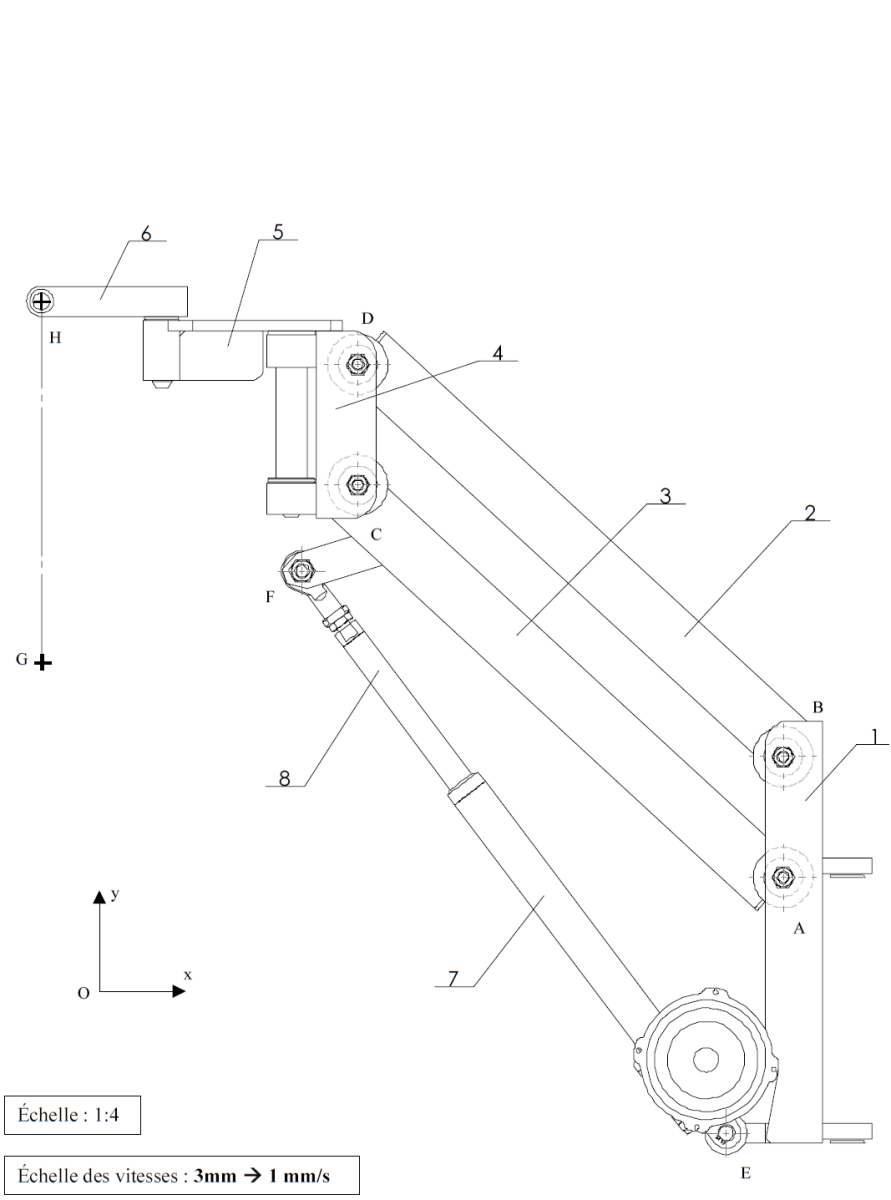
On donne le schéma cinématique du système à parallélogramme en position basse :
Dans ce schéma, le vérin électrique est modélisé par une liaison pivot glissant.
La tige du vérin (8) est complètement rentrée et les bras (2) et (3) sont horizontaux.
Le point F représente le centre de l'articulation entre la tige du vérin (8) et le bras inférieur (3).
La position de la personne est modélisée par le point G qui représente le centre de gravité de la personne à soulever. Ce point est situé sensiblement au niveau des hanches.
On précise que ce point est situé dans le plan de symétrie \((0,\vec x,\vec y)\) de l'ensemble.
La personne est suspendue par un harnais accroché en H et le segment [HG] sera considéré vertical durant tout le mouvement.
L'étude sera menée dans un premier temps pour la position du mécanisme définie sur le document DR1. On précise que le mécanisme est en phase de montée.
On se place dans le cas où le vérin est peu sollicité, la vitesse de la tige (8) par rapport au corps (7) est alors à sa valeur maximale : \(\left \|\overrightarrow{V_{F\in8/7}} \right \|= 15 mm.s^{–1}\).
Q1. Mettre en place cette vitesse à l'échelle demandée sur DR1. Justifier votre tracé sur feuille de copie.
Q2. Tracer le support de \(\overrightarrow{V_{F\in3/1}}\) . Justifier votre tracé sur feuille de copie.
Q3. Définir le mouvement de 7/1 : Mvt 7/1.
Q4. En déduire le support de \(\overrightarrow{V_{F\in7/1}}\) . Justifier votre tracé sur feuille de copie.
Q5. Justifier l'égalité suivante : \(\overrightarrow{V_{F\in8/1}}=\overrightarrow{V_{F\in3/1}}\)
Q6. Déterminer la relation de composition de vitesses qui lie \(\overrightarrow{V_{F\in8/1}}\) avec \(\overrightarrow{V_{F\in7/1}}\) et \(\overrightarrow{V_{F\in8/7}}\).
Q7. Traduire graphiquement cette relation sur DR1 et donner la norme de \(\overrightarrow{V_{F\in3/1}}\).