Le repère
Solide de référence, repère d'espace
Un repère, noté \(\mathfrak{R}=(O,\vec{x},\vec{y},\vec{z})\), est constitué :
d'une origine, le point O dans l'exemple, en général un point particulier du solide ;
d'une base orthonormée directe, \(B=(\vec{x},\vec{y},\vec{z})\), dans l'exemple.
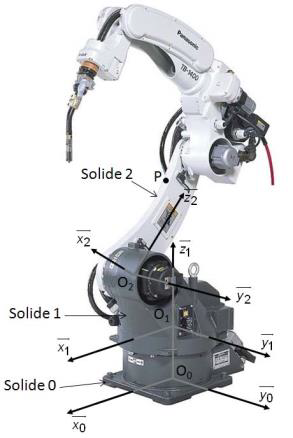
On associe à chaque solide un repère.
Au solide 0 sera associé le repère \((O_0,\vec{x_0},\vec{y_0},\vec{z_0})\), au solide 1 le repère \((O_1,\vec{x_1},\vec{y_1},\vec{z_1})\), etc ...
Dans un repère associé à un solide, chaque point matériel du solide, est supposé fixe.
Repérer ou positionner, un solide 1 par rapport à un solide 2 revient ainsi à positionner le repère associé au solide 1 par rapport au repère associé au solide 2.
Dans la suite, on parlera indifféremment d'un solide ou du repère qui lui est associé.
Exemple :
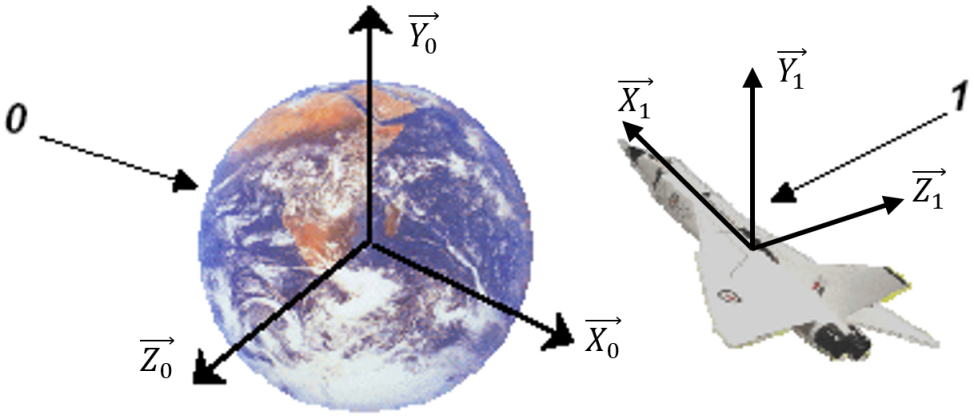
Le mouvement d'un solide est défini par rapport à un autre solide pris comme référence.
Ce dernier est appelé solide de référence. Par exemple la terre.
Le repère d'espace est un repère orthonormé de sens direct lié à ce solide.
Tout mouvement du solide étudié, ici l'avion, est repéré par rapport au solide de référence.
La terre, repérée 0, est appelé solide de référence, auquel on associe le repère de référence \(\mathfrak{R}_{0}\). Le mouvement du solide 1 par rapport au solide 0 est noté Mvt 1/0.
Exemple :
En observant cette scène d'un point fixe, on remarque un vaisseau en mouvement avec un oiseau dessus
En se déplaçant, les mouvements semblent différents
D'un point de vue du vaisseau c'est la terre et l'oiseau qui bougent
D'autres mouvements sont observables si on est l'oiseau
