Localiser un point matériel M appartenant à un solide S
Remarque : Notations conventionnelles
On différencie généralement l'expression des paramètres cinématiques :
pour les mouvements de translation avec des lettres latines :
pour la position linéaire : p(t), x(t), y(t)...
pour la vitesse linéaire : v(t), x'(t)...
pour l'accélération linéaire : a(t), x''(t)...
pour les mouvements de rotation avec des lettres grecques :
pour la position angulaire : α(t), θ(t)...
pour la vitesse angulaire : ω(t) ou Ω(t), θ'(t)...
pour l'accélération angulaire : ω'(t), θ''(t)...
Quel que soit le lettrage adopté, seule l'unité authentifiera la grandeur calculée.
Par rapport à quoi ?
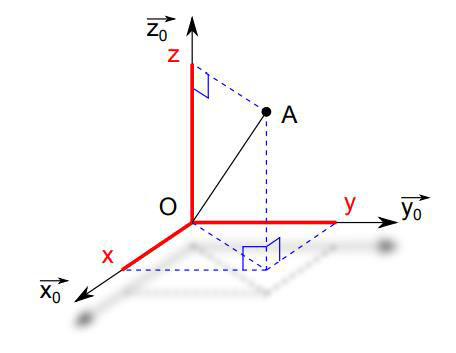
Coordonnées cartésiennes :
\(\overrightarrow{OA}=x . \vec{x_0}+y . \vec{y_0}+z . \vec{z_0}\)
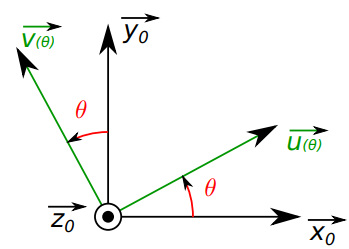
Coordonnées cylindriques :
\(\overrightarrow{OA}=r . \overrightarrow{u_{(\theta)}}+z . \vec{z_0}\)
Avec \(r . \overrightarrow{u_{(\theta)}}=r . \left( \cos(\theta).\vec{x_0}+\sin(\theta).\vec{y_0}\right)\)
Et \(\theta =( \widehat{\vec{x_0}, \vec{u}})\)

Relation entre coordonnées cartésiennes et cylindriques :
\(x = r . \cos \theta\)
\(y = r . \sin \theta\)
Par quel chemin ?
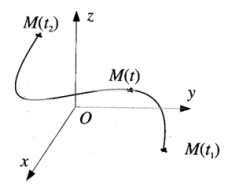
Définition : La trajectoire d'un point
On appelle trajectoire du point M par rapport au repère R entre les dates t1 et t2, l'ensemble des positions successives de ce point entre ces deux dates. On la note TM,S/R.
Cas de la translation rectiligne d'un point M suivant une direction passant par un point O (par exemple : axe x) : droite de direction (ou d'axe) Ox.
Cas de la rotation d'un point M autour d'un axe fixe passant par un point O (par exemple : axe z) : cercle de centre O d'axe z, de rayon OM.