Exploitation de la simulation et des résultats : Influence de l'inertie au démarrage
Simulation et résultats du montage 1
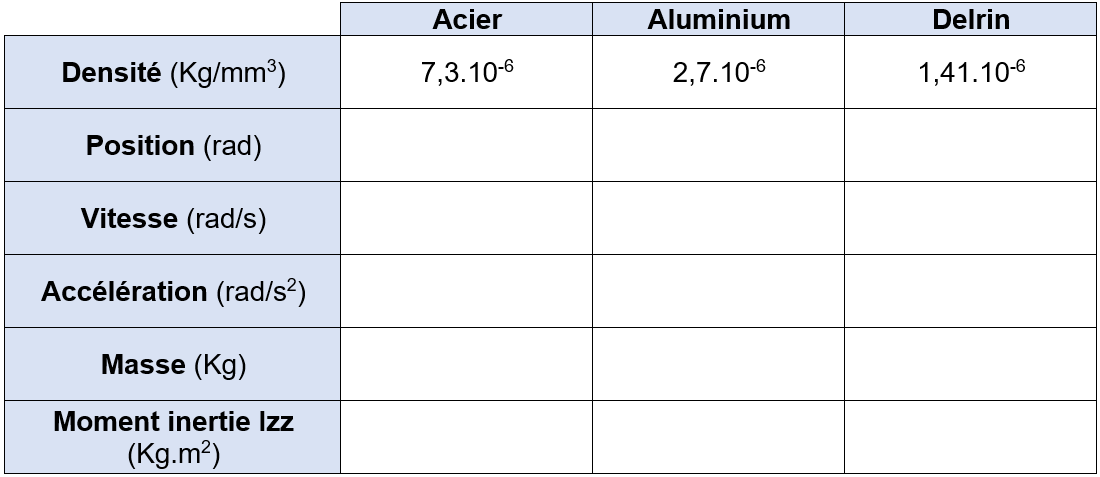
A partir du modèle MATLAB, relever la masse du cylindre (en acier au départ) ainsi que son inertie.
Q1. La matrice d'inertie d'un cylindre est diagonale, c'est-à-dire que les produits d'inertie sont nuls.
Or, ici la matrice d'inertie donnée par Matlab pour le cylindre n'est pas diagonale. Justifier.
Réaliser une simulation pendant 1 seconde. → Vérifier le temps de simulation choisi  .
.
Visualiser les graphes de la vitesse angulaire, de l'accélération angulaire et de la position angulaire.
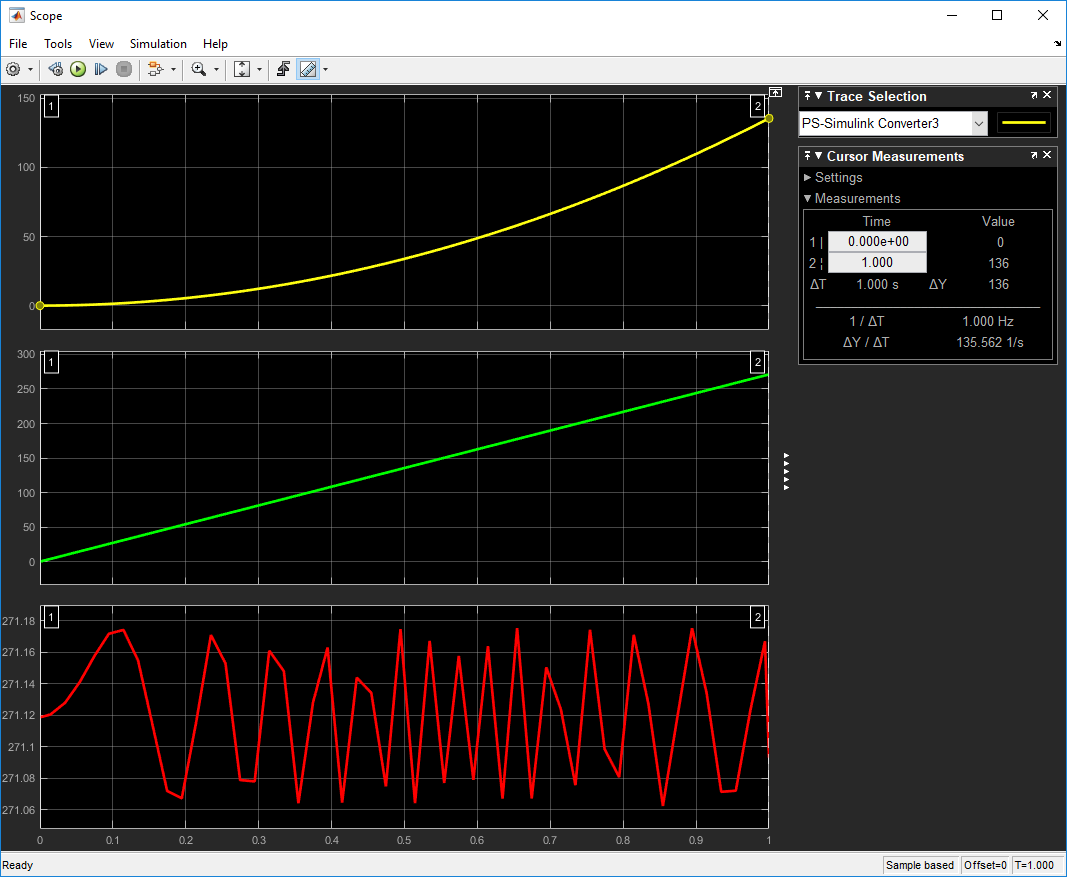
Q2. En déduire :
La vitesse angulaire en rad.s–1 à cet instant.
L'accélération en rad.s–2 subit par le cylindre de Ø100mm.
La position angulaire en rad à l'issue de la seconde de simulation.
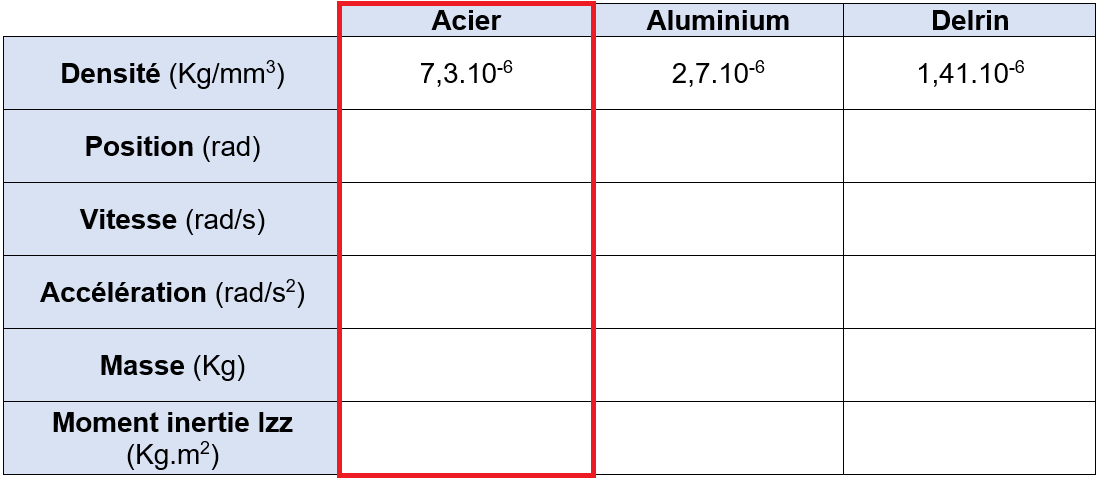
Compléter la première colonne du document réponse.
Attention :
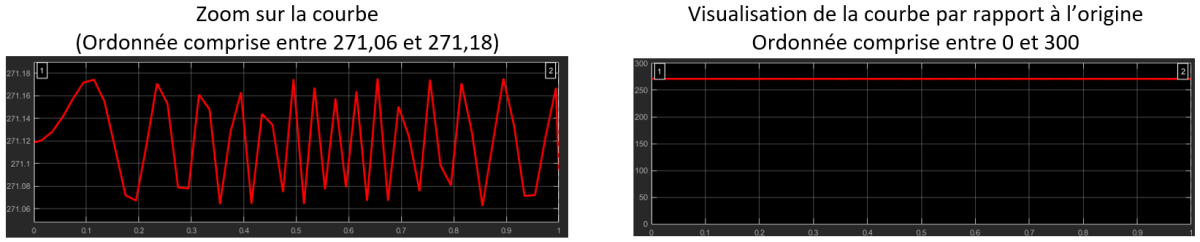
Il faut bien faire attention à l'échelle utilisée lors de l'interprétation d'une courbe avec en scope.
Regarder bien les deux courbes suivantes qui sont les mêmes mais avec une échelle différente.
Complément : Ajustement du scope
Montage 1 : changement de matière
Pour connaître les paramètres du cylindre avec un nouveau matériau, il faut recalculer les caractéristiques (en changeant la masse volumique sous Matlab).
Quand la masse volumique n'est pas connue, il est possible d'utiliser le logiciel SolidWorks en suivant la procédure.
Dans le modèle MATLAB, modifier les paramètres du cylindre (masse volumique) pour simuler un cylindre en aluminium.
Relancer la simulation.
Q3. Récupérer les résultats, comme ci dessus, en les notifiant sur le document réponse (aluminium, colonne 2[1]).
Q4. Changer de nouveau la matière en DELRIN (Plastique).
Simuler, récupérer les résultats et compléter la colonne 3[2].
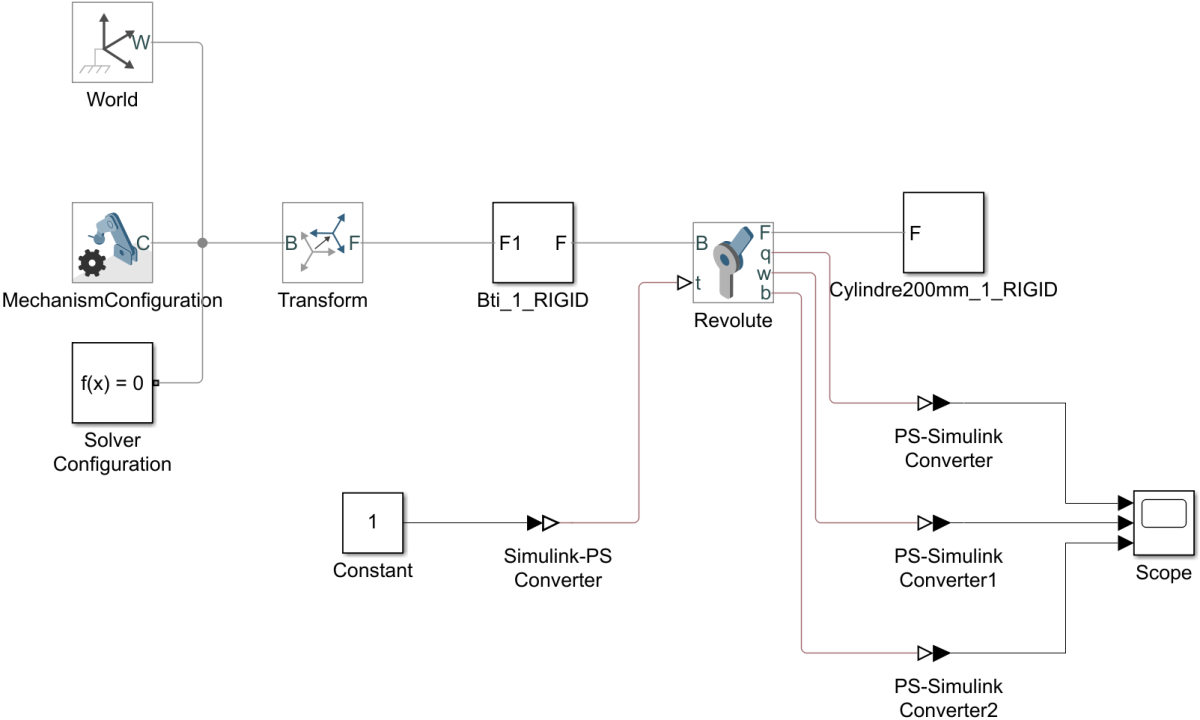
Simulation et résultats du montage 2
Effectuer les mêmes simulations et relevés de résultats sur le fichier montage2 qui se présente avec un cylindre de Ø200mm.
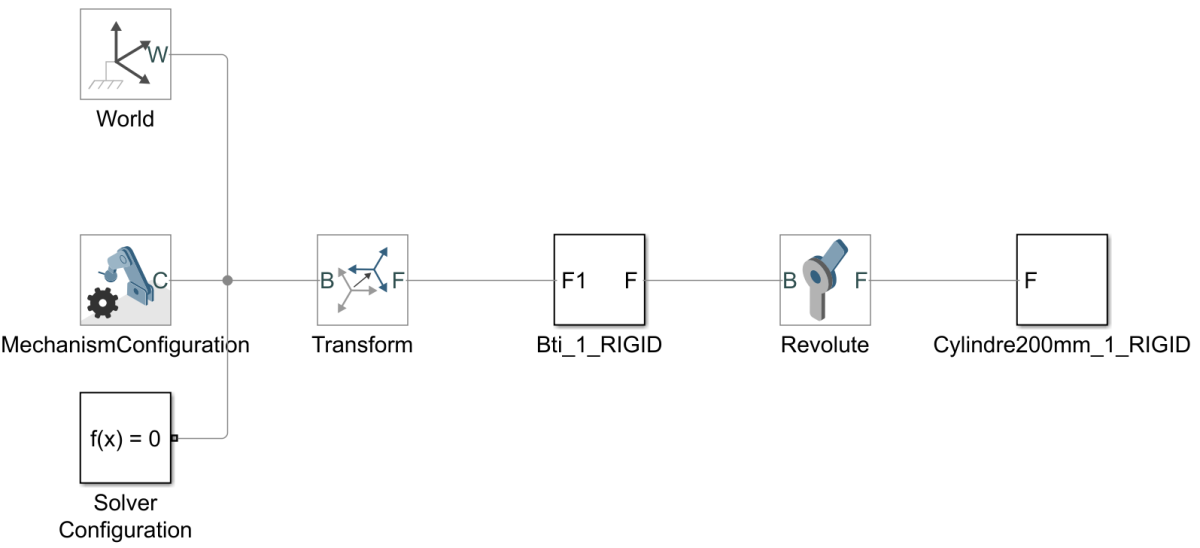
Pour cela, avec le logiciel Matlab, Ouvrir le modèle "montage2_rot".
En l'état, l'étude n'est pas possible car la liaison pivot ("Revolute") n'est pas pilotée (contrairement au montage 1).
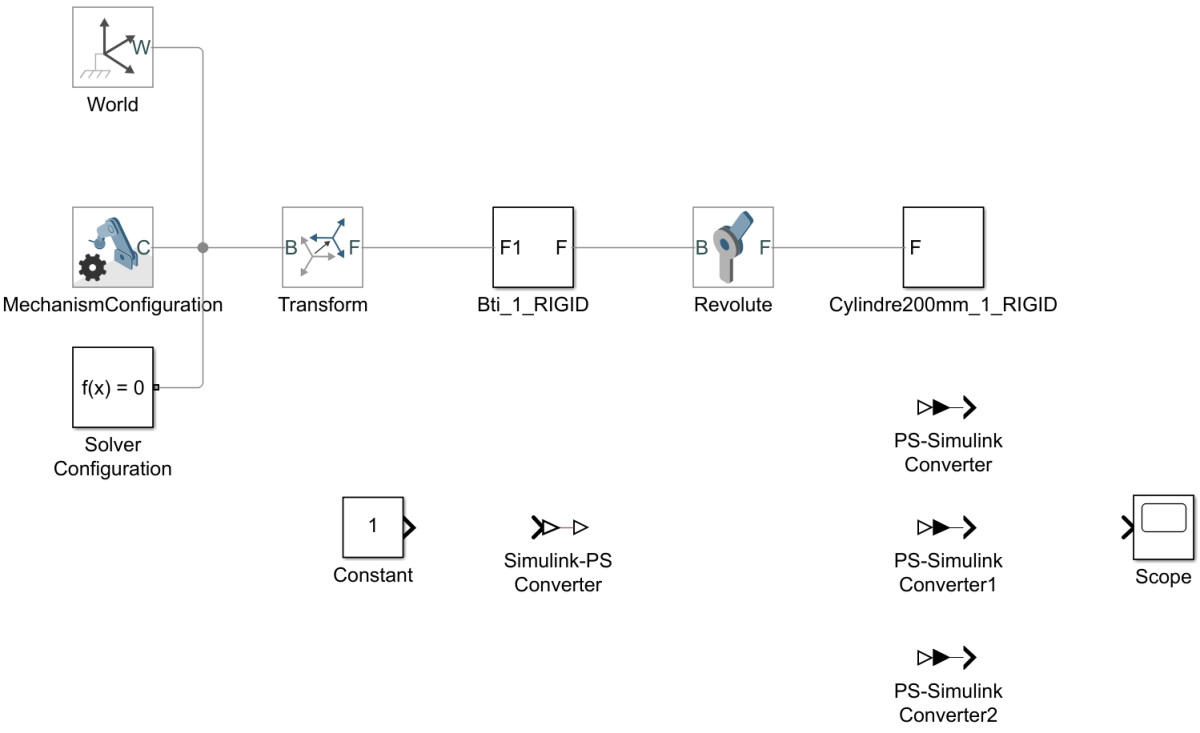
Il faut donc utiliser le gestionnaire de bibliothèque ![]() pour "récupérer" les éléments ci-dessous à insérer dans le modèle comme ci-contre.
pour "récupérer" les éléments ci-dessous à insérer dans le modèle comme ci-contre.
Ajouter les éléments ci-dessous dans le modèle comme ci-contre.
Fonction du composant | Représentation | Bibliothèque |
|---|---|---|
Conversion d'un signal Simulink en signal Physique |
| Simscape / Utilities |
Conversion d'un signal Physique en signal Simulink |
| Simscape / Utilities |
Constante |
| Simulink / Sources |
Moniteur |
| Simulink / Sinks |




Pour l'instant les composants ne peuvent pas être relié à la liaison pivot.
pour cela, il faut préciser que l'on souhaite commandé la liaison (en précisant comment : "Couple" ou "Vitesse angulaire" - Effort ou flux).
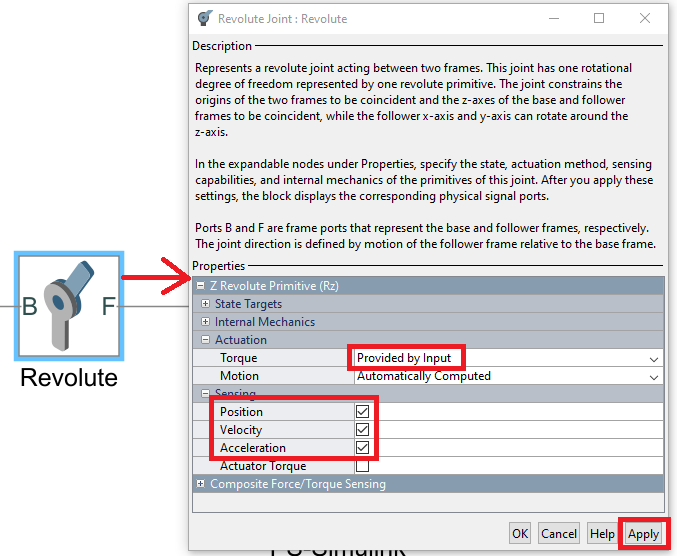
Double-cliquer sur la liaison "Revolute".
Développer la ligne "Actuation" (en cliquant sur le "+").
Sélectionner "Provided by Input" pour le couple "Torque".
Développer la ligne "Sensing" (en cliquant sur le "+").
Cocher les paramètres à visualiser : "Position", "Velocity" et "Accélération".
Cliquer sur "Apply" puis sur "OK".
Ouvrir le Scope , sélectionner "File" → "Number of Inputs Ports" et en prendre 3.
Relier les différents composants comme sur le modèle ci-contre.
Le modèle est maintenant prêt pour l'exploitation.
Q5. Faire valider par le professeur la finalisation de la simulation multiphysique.
Q6. Effectuer les mêmes simulations et relevés de résultats sur le fichier montage 2 qui se présente avec un cylindre de 200mm.
Compléter le document réponse.
Q7. Indiquer l'influence du moment d'inertie sur l'accélération au démarrage.