Présentation
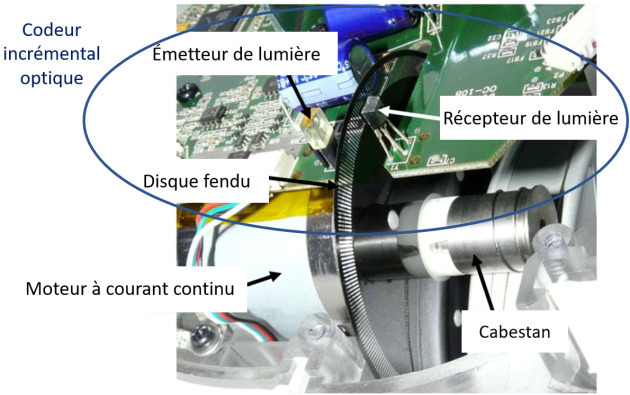
Le déplacement angulaire des axes de rotation des moteurs du robot s’obtient à partir de capteurs angulaires de type codeurs incrémentaux.
Ces codeurs sont constitués d’un disque opaque présentant des fentes transparentes régulières. Une source de lumière est placée d’un côté du disque et deux récepteurs photoélectriques accolés sont placés de l’autre côté. Le rayon lumineux reçu par chacun des récepteurs est donc coupé à intervalles réguliers lorsque le disque, entraîné par le moteur, tourne sur son axe
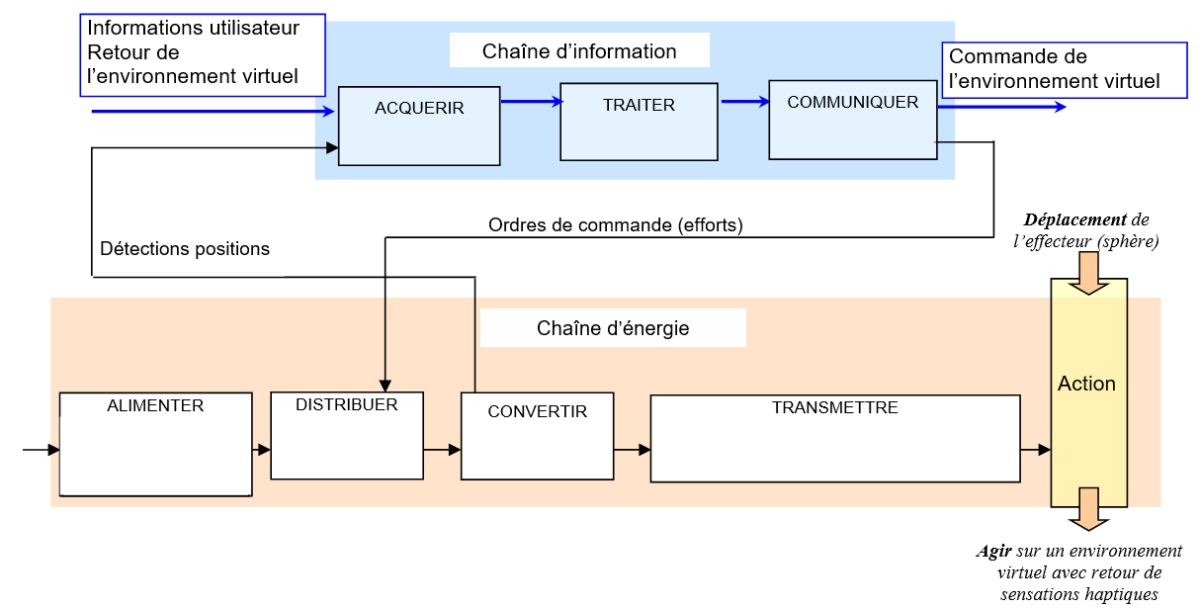
Q8. A partir des éléments disponibles dans le dossier technique, et en particulier dans la section « La chaîne d’information » (voir ci-contre) et « La chaîne de puissance », compléter la structure fonctionnelle ci-dessous. En particulier, bien positionner les codeurs incrémentaux optiques dans la structure fonctionnelle