Fonctionnement d'un seul robot en interaction avec un environnement virtuel
Attention :
Les robots haptiques à disposition sont fragiles. Ne pas faire de mouvement trop brusque et limiter l'amplitude des mouvements.
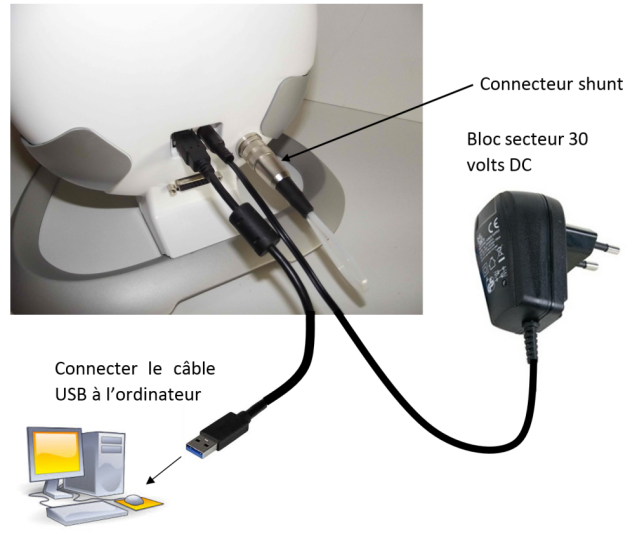
Brancher un robot haptique comme l'image ci-dessous, en utilisant un connecteur shunt, un bloc secteur 30V et un câble USB.
Lancer le logiciel Falcon_Tutorial.
Ce dernier permet de découvrir l'utilisation du retour haptique dans un environnement 3D virtuel.
Fondamental :
Manipuler l'effecteur (la boule blanche avec des boutons) du robot haptique, jusqu'aux 2 butées extrêmes des bras. Ceci permet d'initialiser les codeurs. Lorsque cette manipulation est effectuée, le robot haptique est de couleur bleu au lieu de rouge.
Le logiciel permet 4 modes de simulation (à l'aide des touches clavier F1 à F4) :
simulation de matière, autour d'une boule qui peut être de 9 textures différentes : pour cela, appuyer sur la touche F1 afin d'obtenir à l'écran le titre "NO texture" ainsi qu'une boule virtuelle et une main virtuelle. A l'aide de la flèche du clavier (→), choisir une texture pour la boule (bumpy=cailloux, molasses=mou, ice=glace, sandpaper=papier de verre, magnetic=magnétique, rubber=caoutchouc, sand=sable, honey=miel), puis manipuler l'effecteur du robot haptique, afin de sentir cette texture autour de la boule virtuelle ;
simulation du maniement d'une balle suspendue : pour cela, appuyer sur la touche F2, afin de changer de mode. Une balle virtuelle et un une main virtuelle apparaissent. Manipuler l'effecteur du robot haptique, afin d'amener la main virtuelle sur la balle virtuelle, puis cliquer sur un bouton de l'effecteur du robot haptique, afin que la main virtuelle accroche cette balle virtuelle, et enfin, manipuler l'effecteur du robot haptique afin d'animer la balle virtuelle suivant différentes directions....
simulation du rattrapage d'une balle : pour cela, appuyer sur la touche F3, afin de changer de mode. Un robot virtuel et un gant virtuel orange apparaissent. Cliquer sur un bouton de l'effecteur du robot haptique, afin que le robot virtuel lance une balle virtuelle, et essayer avec l'effecteur du robot haptique de rattraper cette balle virtuelle.
simulation du lancement d'une pierre : pour cela, appuyer sur la touche F4, afin de changer de mode. Un lance pierre virtuel apparaît. Appuyer et rester appuyé sur un bouton de l'effecteur du robot haptique, tout en reculant cet effecteur afin de tendre le lance pierre, et enfin relâcher le bouton de l'effecteur afin de lancer la pierre.