2.2. Présentation du système
Le système à l’étude est un système dit « SIMO » pour « Single Input Multi Outputs ». La seule information que l’on peut fournir au système est la commande du moteur qui pilote le chariot. Les sorties sont l’angle du pendule et la position du chariot.

La mesure de l’angle est donnée en radians. Le 0 radians correspond à la position verticale du pendule (c’est un choix du constructeur). Dans notre étude, comme nous voulons contrôler le balancier du pendule, nous allons donc travailler avec la position p. Par ailleurs, la course totale du chariot est de 1m (± 0.5m autour de la position centrale repérée sur le rail). La consigne et la mesure de la position sont donc elles aussi données en mètres.
Voici donc à quoi ressemble schématiquement la structure de régulation :
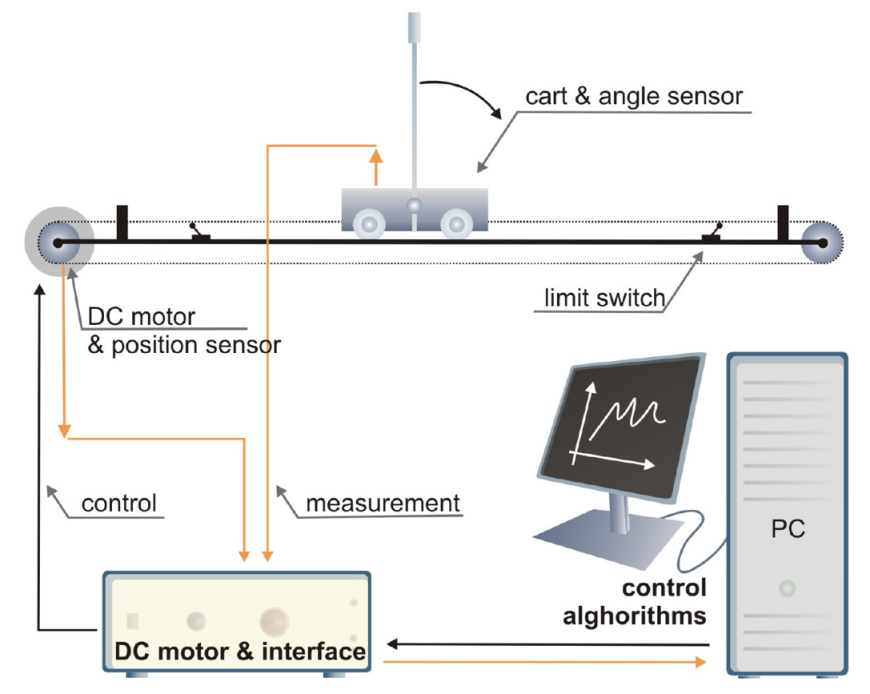
Dans le bloc « DC motor & interface » (boitier de contrôle (3) présenté plus haut) on trouve, entre autres, une carte d’E/S de type PCI1711 qui permet de convertir les valeurs numérique (digitales) émanant du logiciel de contrôle en valeurs analogiques comprises par le variateur (envoi de la consigne au moteur). On y trouve également un système d’acquisition des signaux émanant des capteurs de position et d’angle qui sont ensuite visualisables sur le PC (chaine d’acquisition).