Prise en main de la problématique
Prise en main matérielle de Control'X
Mettre sous tension Control'X : pour cela, basculer l'interrupteur situé au dos du carter sur la position 1 :

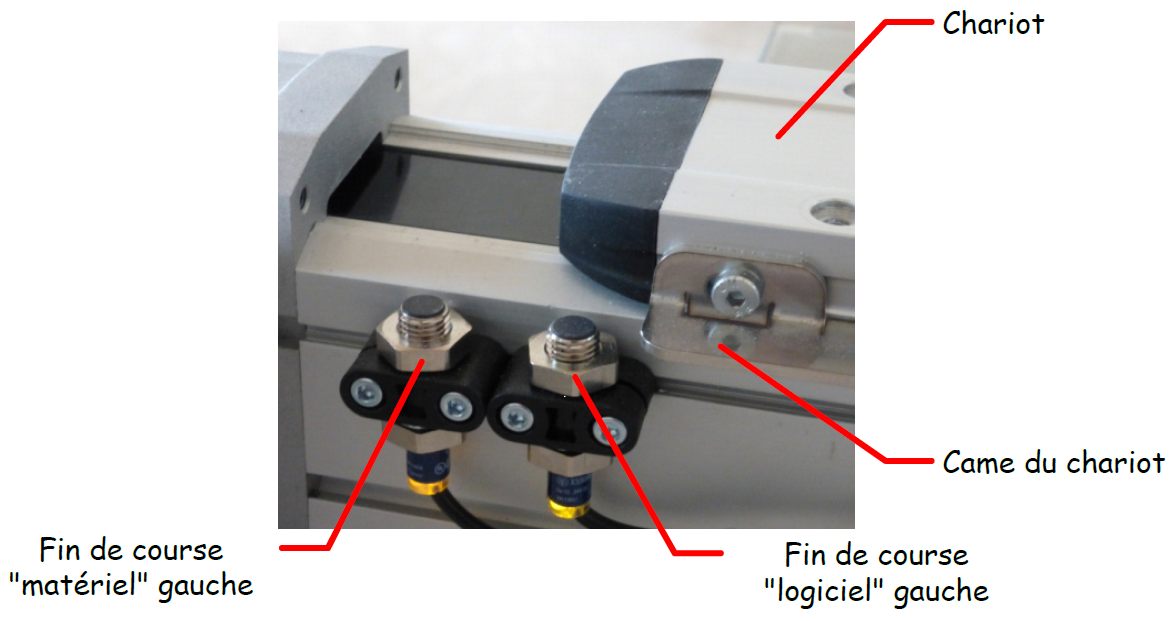
Vérifier que la came du chariot de Control'X ne recouvre pas les capteurs de fin de course "matériels". Si cela devait être le cas, déplacer à la main le chariot vers l'intérieur de façon à découvrir ces deux capteurs :
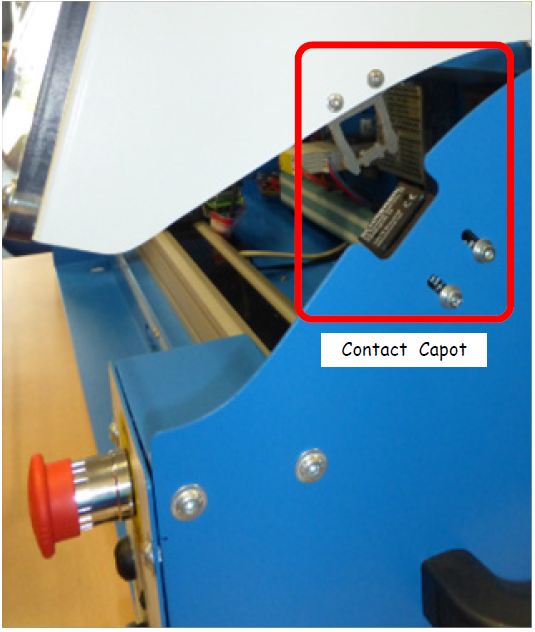
Fermer le capot du carter pour fermer l'interrupteur de sécurité :
Sur le pupitre, déverrouiller l'arrêt d'urgence puis appuyer sur le bouton poussoir "Armer système". Un relais autoalimenté colle et la diode verte "variateur prêt" s'allume.

Lancer maintenant le logiciel Control'Drive
 :depuis l'ordinateur connecté à la maquette.
:depuis l'ordinateur connecté à la maquette.

Sauf s'il ne l'est déjà, le chariot de Control'X doit s'initialiser à gauche sur le capteur de fin de course "logiciel".
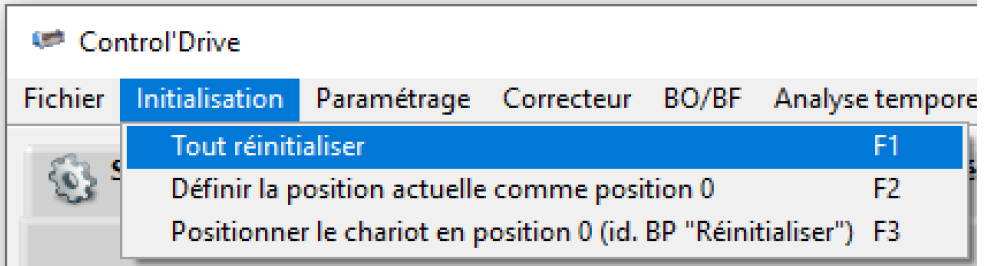
Si Control'Drive a été lancé avant d'armer Control'X, effectuer une réinitialisation en utilisant la fonction "Tout réinitialiser" du menu "Initialisation " :
Dans ce qui suit le menu désigne le bandeau supérieur :

Un onglet désigne un bandeau du type :

On peut fréquemment observer la barre d'état en bas de Control'Drive qui regroupe les informations essentielles relatives à l'état de Control'X :

L'exploitation peut maintenant commencer. Se placer en boucle ouverte (Menu "BO/BF") et découvrir les trois premiers onglets : "Schéma structurel", "Schéma fonctionnel" et "Schéma bloc".
Survoler les différentes zones de l'écran avec la souris pour découvrir l'architecture de la chaîne fonctionnelle.
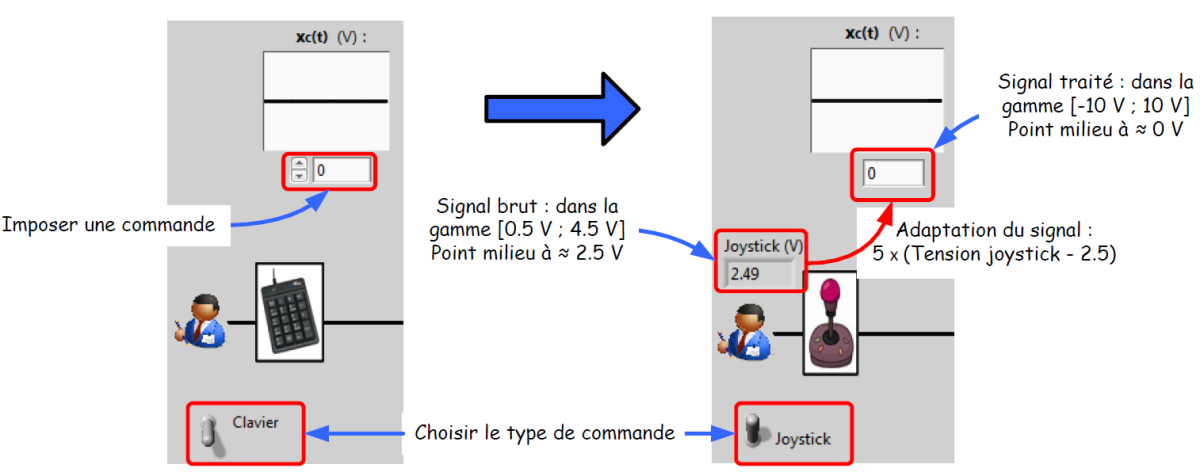
Se placer dans l'onglet "Schéma bloc" puis pilotez le système avec différents échelons de tension. Le pilotage peut s'effectuer soit au clavier soit au joystick :
Observer le comportement du système. Essayer d'atteindre la position 300 mm par exemple avec une précision de l'ordre du mm.
On cherche maintenant à mettre en place une stratégie de commande permettant d'atteindre automatiquement, rapidement et précisément une position donnée : par exemple 300 mm ± 1 mm tout au long du TP.