Collectif 1 : Mise en place d'une stratégie de pilotage
Faire le point sur les comportements observés.
On donne les trois modèles de comportement suivants pour l'ensemble des composants de la chaîne directe de Control'X :
Modèle 1
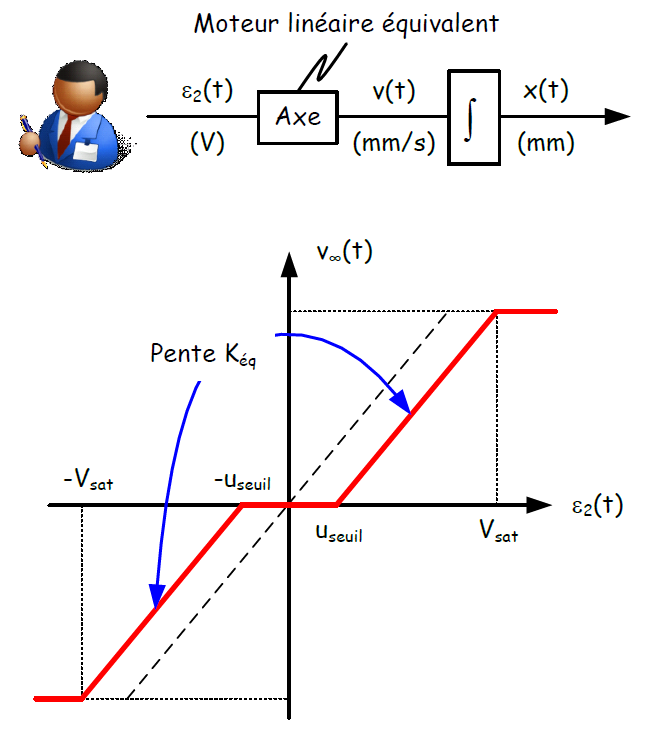
Moteur sans dynamique : Pour une tension d'alimentation constante donnée \(\varepsilon_2(t)\), la vitesse V∞(t) est atteinte immédiatement. Tension de seuil useuil négligée. Tension de saturation Vsat prise en compte.
Modèle 2
Moteur sans dynamique. Tension de seuil useuil et tension de saturation Vsat prises en compte.
Modèle 3
Dynamique du moteur prise en compte : Système caractérisé par une équation différentielle du premier ordre du type : \(\tau_{eq}.\dfrac{dv(t)}{dt}+v(t)=K_{eq}.\varepsilon_2(t)\).
Tension de seuil useuil et tension de saturation Vsat prises en compte.
Valeurs numériques pour les 3 modèles | |||
|---|---|---|---|
Vsat=10V | useuil=1.5V | Keq=132 (mm/s)/V | \(\tau_{eq}\)=22ms |
Travail préliminaire
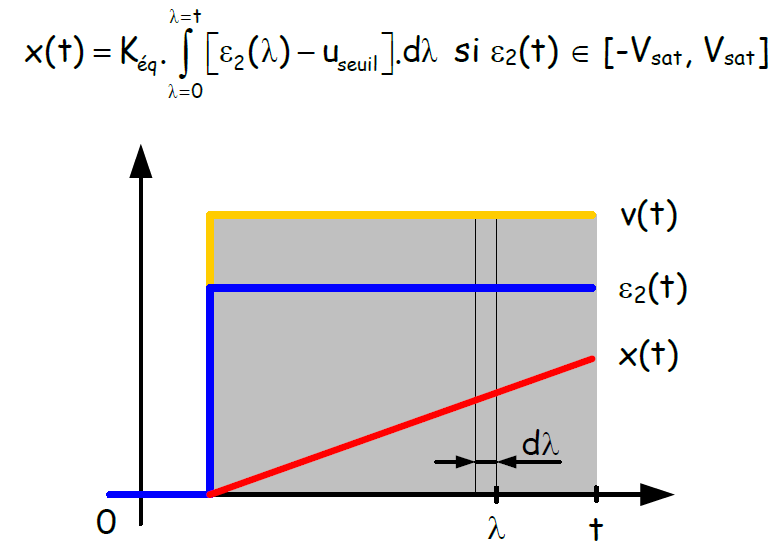
Montrer que dans le cas du modèle 2 (le modèle 1 se déduit du modèle 2), la position obtenue (CI nulle) correspond à l'intégrale de la tension d'alimentation \(\varepsilon_2(t)\) appliquée :
\(x(t)=K_{eq}. \displaystyle \int_{\lambda=0}^{\lambda=t} [\varepsilon_2(\lambda)-u_{seuil}] \, \mathrm{d}\lambda\) si \(\varepsilon_2(t) \in[-V_{sat}, V_{sat}]\).
On cherche maintenant à piloter le système, toujours en boucle ouverte, mais en imposant un signal \(\varepsilon_2(t)\) calculé (programmé) de façon à ce que le chariot se positionne à 300 mm. Exploiter les modèles 1 et 2 pour calculer la durée pendant laquelle il est nécessaire d'appliquer la tension constante \(\varepsilon_2(t)\) pour que le chariot se positionne à 300 mm.
Tension constante \(\varepsilon_2(t)\) | Durée nécessaire T(s) pour parcourir 300 mm | |
|---|---|---|
Modèle 1 | Modèle 2 | |
4V | ||
7V | ||
10V | ||