Simulation 1 : Simulation du pilotage en boucle ouverte
Téléverser le dossier zippé sur le bureau et en extraire tout le contenu (cliquer droit sur le dossier et opter pour Extraire tout...). En fin de séance, effacer les DEUX dossiers (dossier zippé et dossier ordinaire).
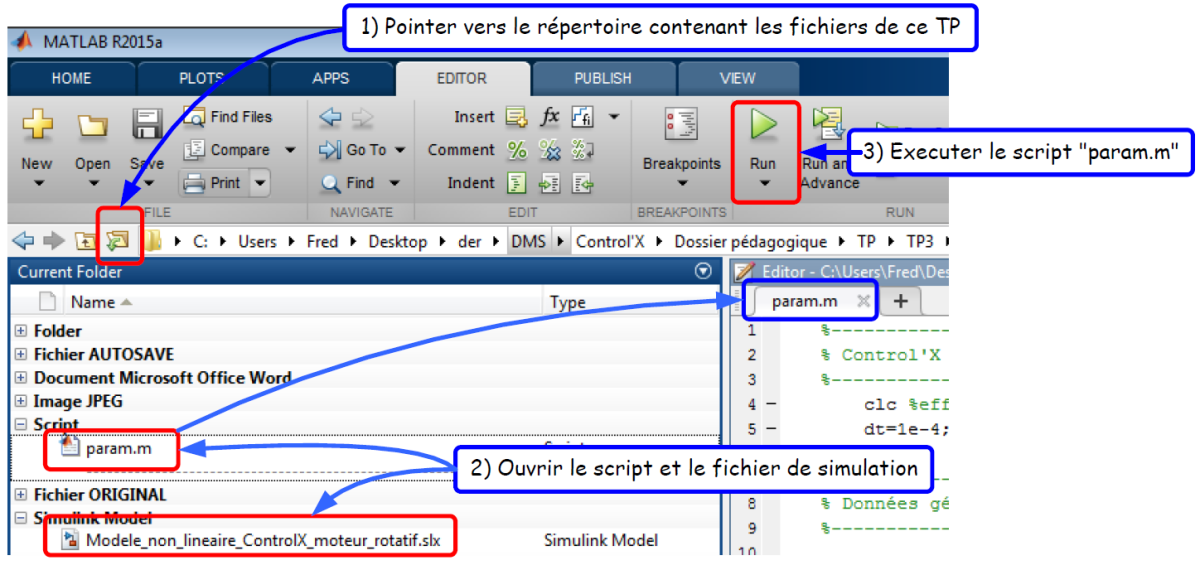
Lancer Matlab-Simulink, sélectionner le chemin de travail de ce TP puis :
ouvrir et lancer le fichier "param.m" (récupéré depuis l'archive ci-dessus)
ouvrir le fichier "Modele_non_lineaire_ControlX.slx"
Le pilotage s'effectue dans un premier temps en imposant des tensions \(\varepsilon_{2}(t)\) : basculer l'interrupteur "Manual switch" entre les entrées 1 et 2 ou modifier la valeur numérique de l'une ou l'autre des deux entrées. Observer l'évolution de la vitesse v(t) et de la position x(t) du chariot.
Quelle tension \(\varepsilon_{2}(t)\) doit-on appliquer une fois que la position x(t) est stabilisée à la valeur souhaitée ?
Imposer des perturbations (environ 50 N) grâce à l'entrée "Force perturbatrice" : le chariot reste-t-il dans sa position ?