Modèle cinématique d'un mécanisme : schéma cinématique et graphe des liaisons
Une pièce dans l'espace peut avoir une infinité de mouvements.
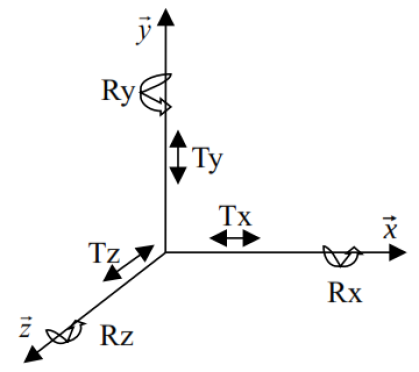
Ces mouvements peuvent être décomposés en 6 mouvements élémentaires :
- 3 translations : Tx, Ty et Tz.
- 3 rotations : Rx, Ry et Rz.
On représente les degrés de liberté dans un tableau comme ci-dessous, les cases vides auront la valeur 0 s'il n'y a pas de degré de liberté, et 1 s'il y a un mouvement possible
Mouvement suivant l'axe | T (mouvement de translation) | R (mouvement de rotation) |
|---|---|---|
\(\vec{x}\) | ||
\(\vec{y}\) | ||
\(\vec{z}\) |
Une autre représentation possible de ce tableau et de remplacer le 1 par la lettre du mouvement avec en indice l'axe exemple Tx , Rz ...
Exemple :
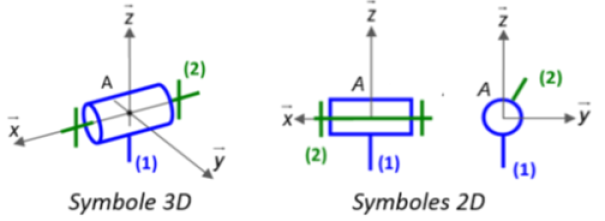
Pour la cas de la liaison pivot ci-contre, le degré de liberté est de 1 : 1 rotation autour de l'axe (A,\(\vec{x}\) ) (RX).
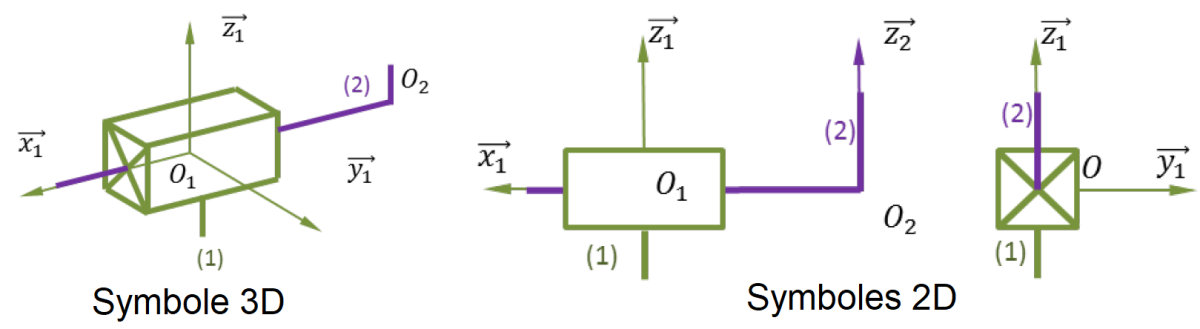
Pour la cas de la liaison glissière ci-contre, le degré de liberté est de 1 : 1 translation suivant \(\vec{x_1}\) TX1
Modèle cinématique
Lorsque l'on souhaite étudier le comportement cinématique d'un mécanisme, il est nécessaire de s'appuyer sur un modèle cinématique.
Ce modèle est représenté par un schéma cinématique et/ou un graphe des liaisons.
Fondamental :
Un modèle cinématique est constitué :
de solide(s) (une pièce ou un ensemble de pièces solidaires) ;
de liaisons qui spécifient les mouvements possibles et les mouvements bloqués, d'un solide par rapport à un autre.
Une liaison est un modèle indépendant de toute réalisation matérielle.
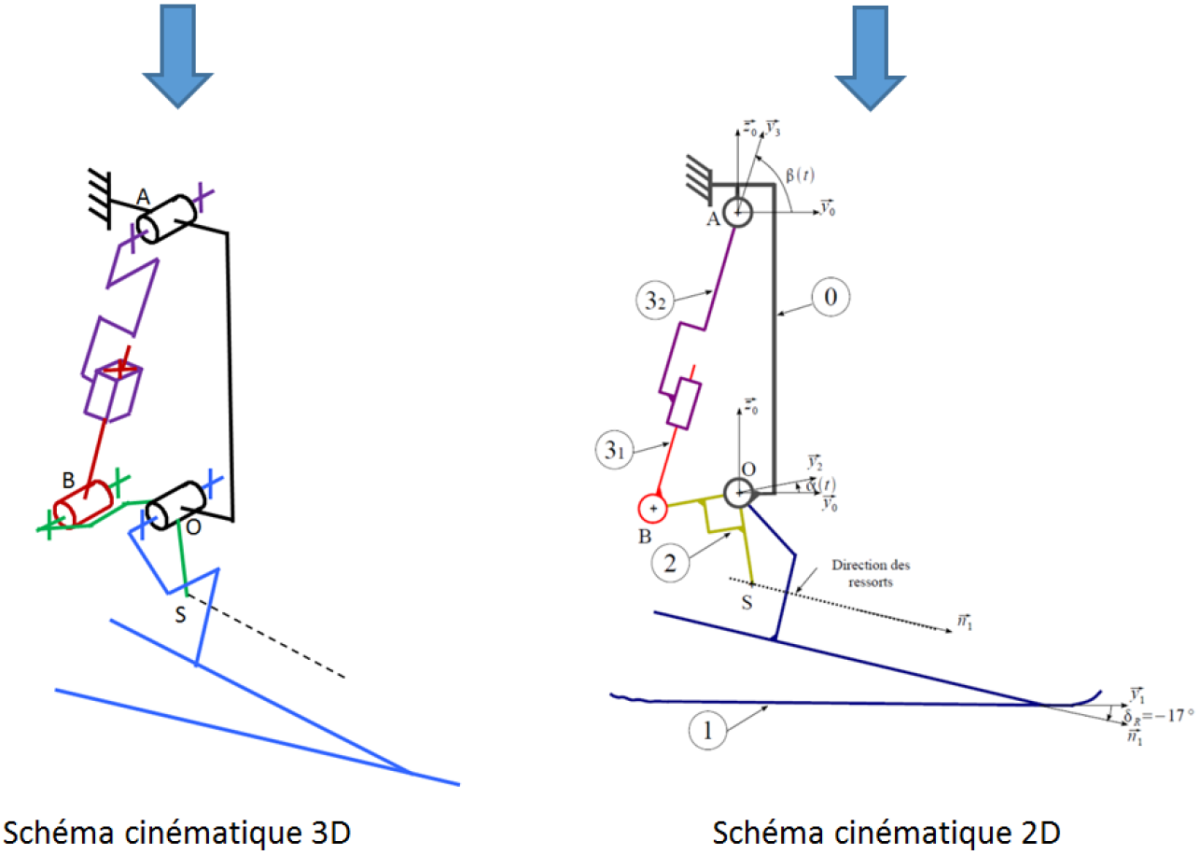
Définition : Schéma cinématique d'un mécanisme
Dans un schéma cinématique :
les liaisons entre les solides sont représentées par des symboles normalisés ;
les solides sont représentés par des traits reliant ces symboles.
Le schéma est dessiné en deux ou trois dimensions. En plus des symboles et traits de définition des solides, on y trouve des points, des vecteurs et des droites.
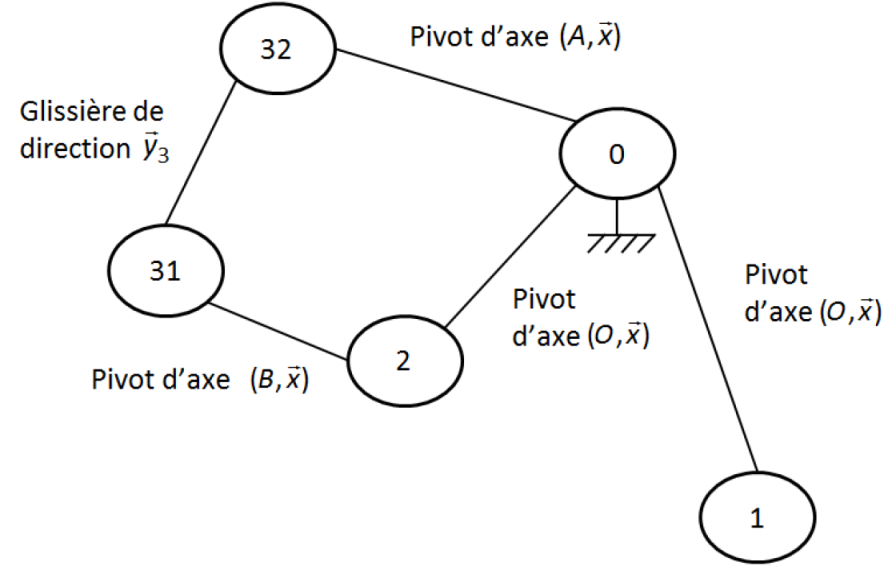
Définition : Graphe des liaisons d'un mécanisme
Dans un graphe des liaisons :
les solides sont représentées par des cercles ;
les liaisons entre les solides sont représentées par des traits, le long desquelles on indique le nom et les caractéristiques géométriques de la liaison.
Le graphe des liaisons est graphiquement plus simple à réaliser qu'un schéma cinématique car la géométrie n'est pas représentée.
Mais il n'y a pas plus d'informations dans un schéma cinématique que dans le graphe des liaisons qui lui est associé. Il s'agit de deux représentations d'un même modèle de comportement cinématique, mais qui mettent en avant des informations différentes.