Introduction
La cinématique est la partie de la mécanique qui étudie les mouvements des corps, indépendamment des causes qui les produisent.
L'analyse des grandeurs cinématiques (position, vitesse et accélération) permet de déterminer la géométrie et les dimensions des composants d'un mécanisme.
Pour des nombreux systèmes, en particulier pour ceux du domaine de la robotique industrielle ou grand public, un des principaux enjeux de leur concepteur est de faire en sorte qu'ils respectent parfaitement la cinématique imposée par leur cahier des charges.
Il s'agit de s'assurer que les mouvements des pièces qui les constituent s'exécutent parfaitement suivant des courses et à des vitesses maîtrisées.

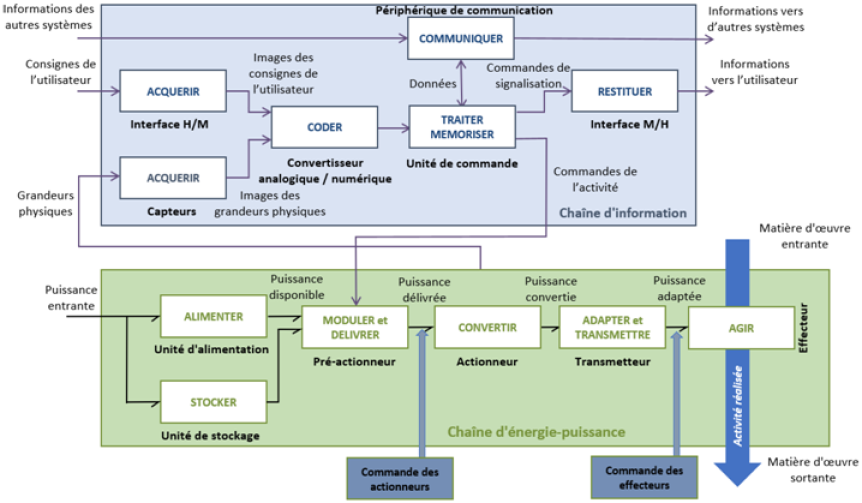
On déterminera alors les lois de commande en mouvement à imposer aux actionneurs de chaque chaîne d'énergie-puissance constituant le système. Ces lois se détermineront en deux étapes :
la première consiste à déterminer les lois de commande en mouvement à imposer aux effecteurs afin de répondre au cahier des charges ;
et la seconde quant à elle consiste à déterminer les lois entrée-sortie de chaque transmetteur pour en déduire les lois de commande en mouvement à imposer aux actionneurs.