Liaisons essentielles pour modéliser un mouvement de rotation et de translation
Remarque : Modélisation d'une rotation
Nous avons vu qu'un mouvement de rotation autour d'un axe (A,\(\vec{x}\) ) entre deux solides 1 et 2, est modélisé par une liaison pivot d'axe (A,\(\vec{x}\) ).
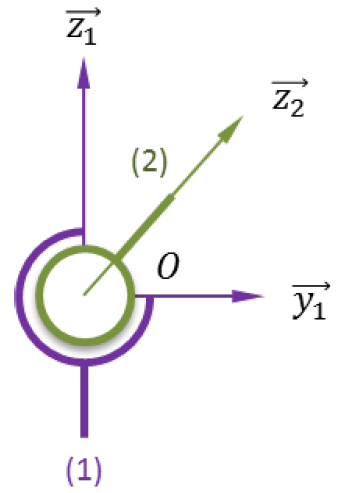
Cependant, dans le plan, il est possible d'obtenir un mouvement de rotation autour d'un axe (O,\(\vec{x_1}\) ) entre deux solides 1 et 2, par une liaison rotule de centre 0.
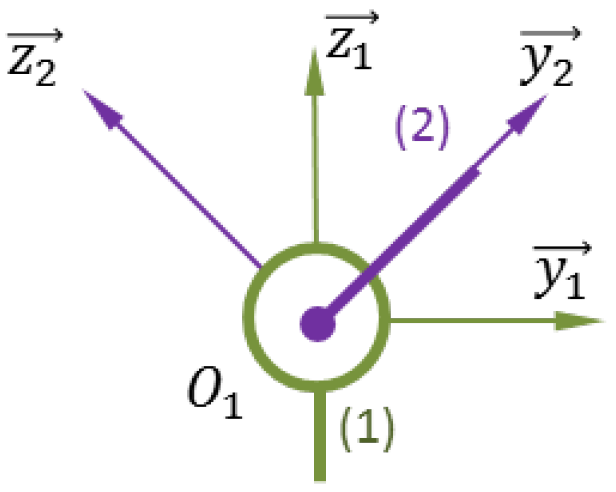
De même, dans le plan, il est possible d'obtenir un mouvement de rotation autour d'un axe (\(O_1,\vec{x_1}\)) entre deux solides 1 et 2, par une liaison pivot glissant d'axe (O1,\(\vec{x_1}\) ).
Remarque : Modélisation d'une translation rectiligne
Nous avons vu qu'un mouvement de translation à trajectoire rectiligne de direction \(\vec{u}\) est modélisé par une liaison glissière de direction \(\vec{u}\).
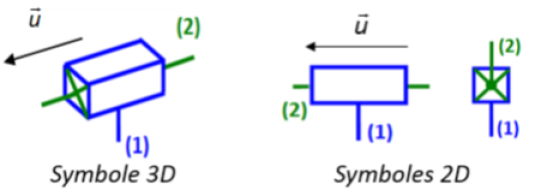
Cependant, dans le plan, il est possible d'obtenir un mouvement de translation à trajectoire rectiligne de direction \(\vec{x_1}\) (par exemple) par une liaison pivot glissant d'axe (O1,\(\vec{x_1}\)).
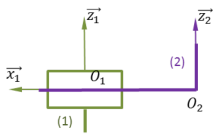
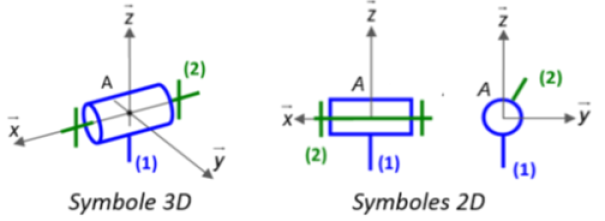
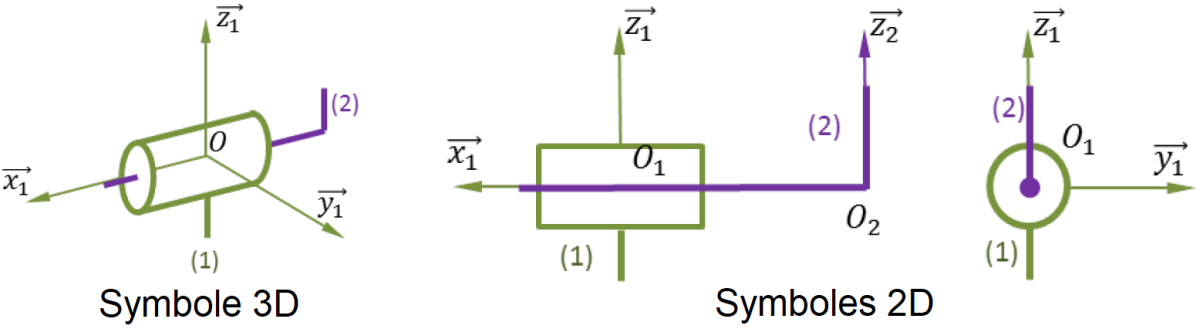
Complément : Liaison pivot glissant
Une liaison pivot glissant d'axe \((O_1,\vec{x_1})\) entre deux solides S1 et S2 autorise une rotation et une translation d'axe \((O_1,\vec{x_1})\) entre S1 et S2.
Degrés de liberté : RX et TX
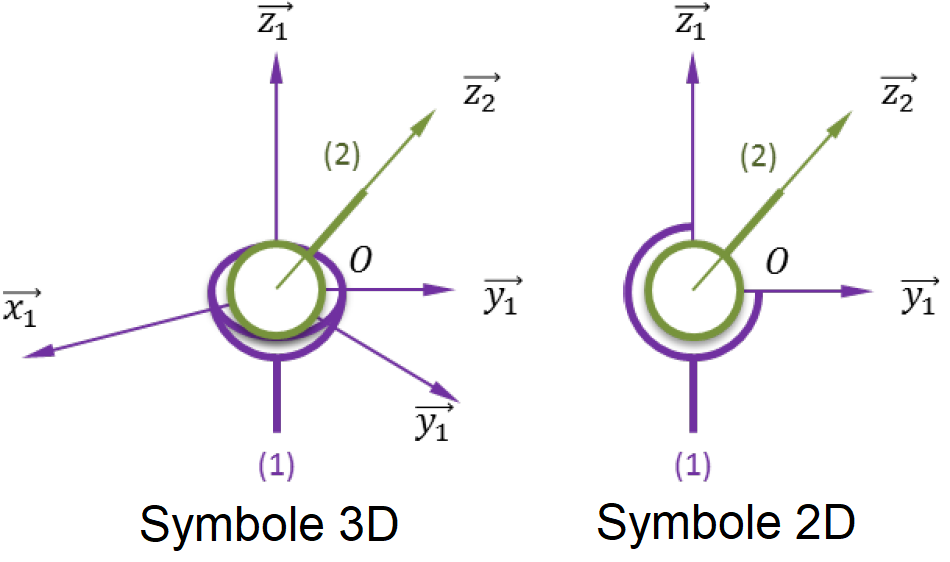
Complément : Liaison rotule ou sphérique
Une liaison rotule de centre O entre deux solides S1 et S2 autorise trois rotations.
Degrés de liberté : RX , RY et RZ.