3.4. Non-linéarités
3.4.1. Friction du chariot
Tout déplacement mécanique est soumis à frottements. Dans notre cas, la mise en route du chariot n’échappe pas à cette règle. Il est donc important d’identifier cette zone morte et d’en tenir compte dans la future régulation.
Préparation
Quel mode opératoire faudrait-il mettre en place afin de mesurer la zone morte de déplacement du chariot. La zone morte est-elle identique en fonction du sens de déplacement ? Cette zone morte est-elle identique tout au long du rail ?
Manipulation 
Utiliser le fichier RT_identif.slx pour effectuer la mesure de friction. Dans le bloc des entrées, il faudra utiliser la constante.
3.4.2. Variateur
Le variateur utilisé pour faire varier la vitesse dans les deux sens de rotation est un hacheur « en pont »
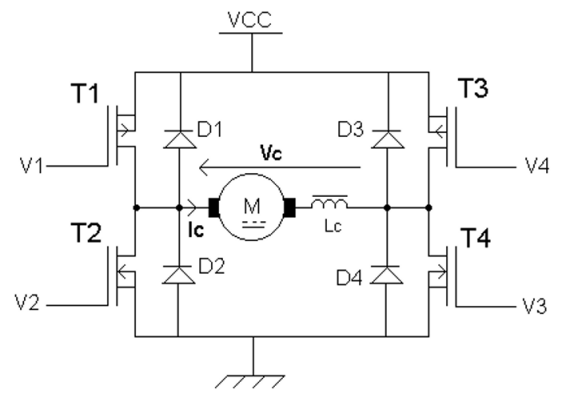
Préparation
Expliquer brièvement le mode de fonctionnement de ce hacheur. En quoi ce type de variateur induit-il des non-linéarités ?
3.4.3. Codeur incrémental
Manipulation
Reprendre une acquisition précédemment effectuée ou en faire une autre sur quelques secondes. En zoomant fortement sur la courbe qui donne \(\theta\), on peut constater la forme en « escalier » du signal.
Cette non-linéarité sera négligée, mais il est fréquent de rencontrer des phénomènes oscillatoires entretenus induits par une valeur comprise entre deux « marches » de l’escalier. On trouve là les limites d’un système numérique.